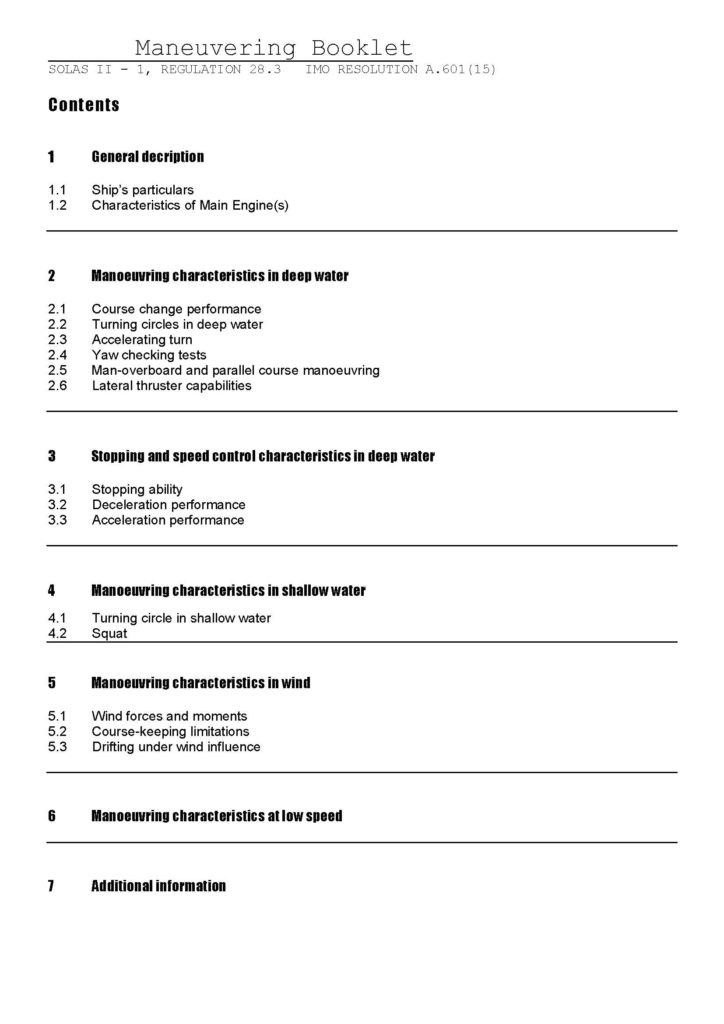
Contents
1 General description
- Ship’s particulars
- Characteristics of Main Engine(s)
2 Manoeuvring characteristics in deep water
- Course change performance
- Turning circles in deep water
- Accelerating turn
- Yaw checking tests
- Man-overboard and parallel course manoeuvring
- Lateral thruster capabilities
3 Stopping and speed control characteristics in deep water
- Stopping ability
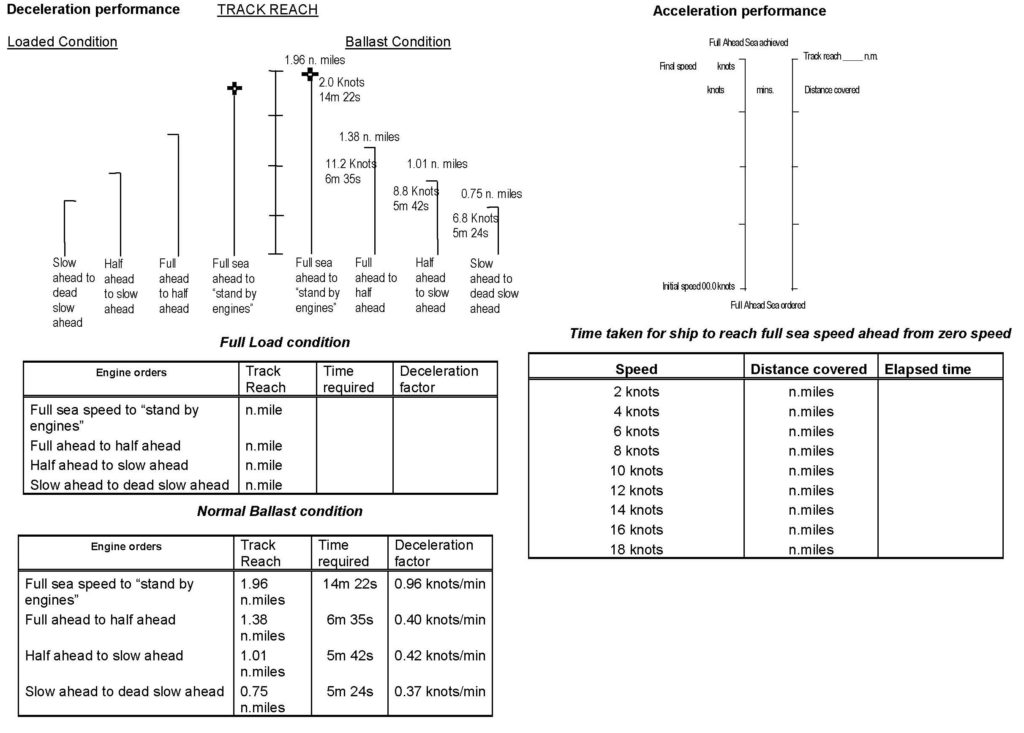
- Deceleration performance
- Acceleration performance
4 Manoeuvring characteristics in shallow water
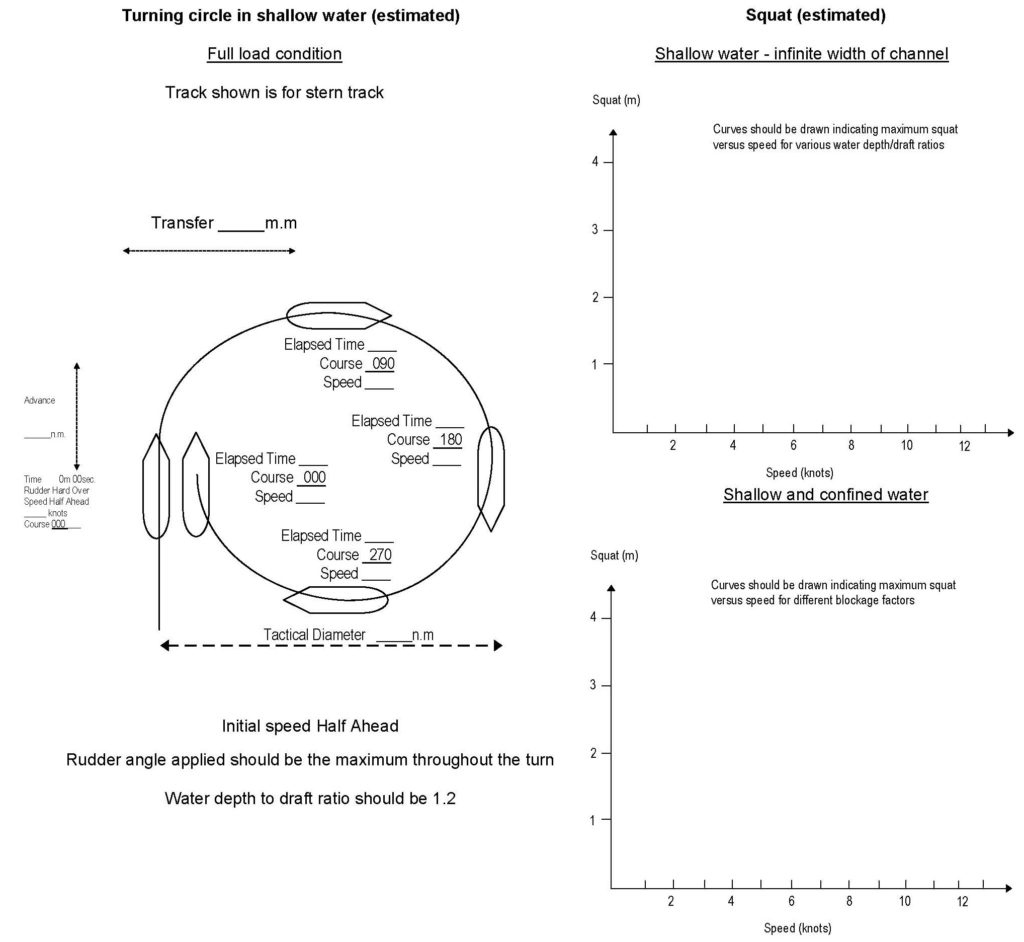
- Turning circle in shallow water
- Squat
5 Manoeuvring characteristics in wind
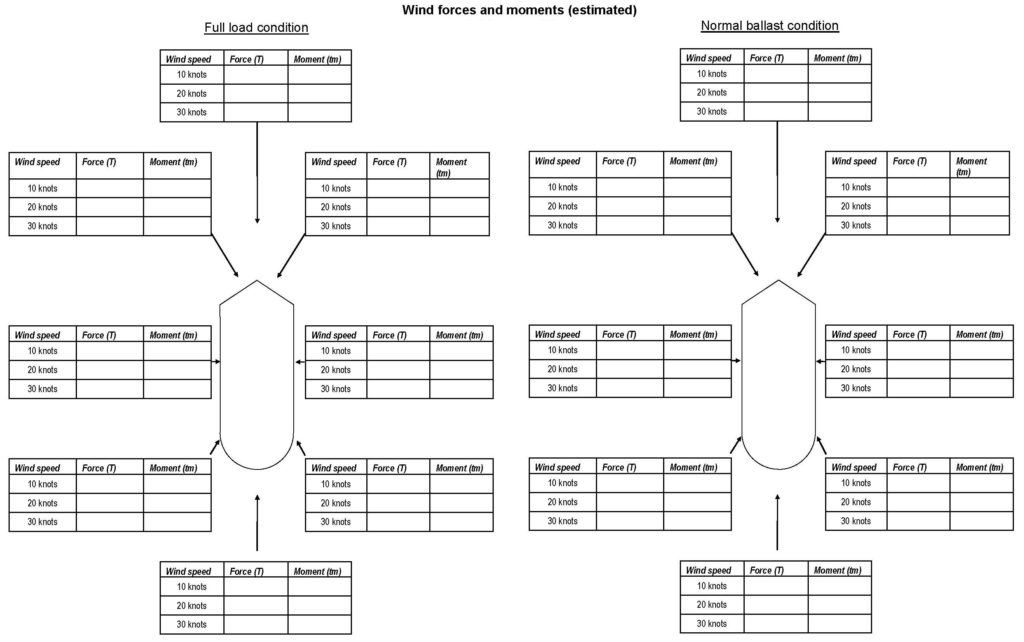
- Wind forces and moments
- Course-keeping limitations
- Drifting under wind influence
6 Manoeuvring characteristics at low speed
1. General Description
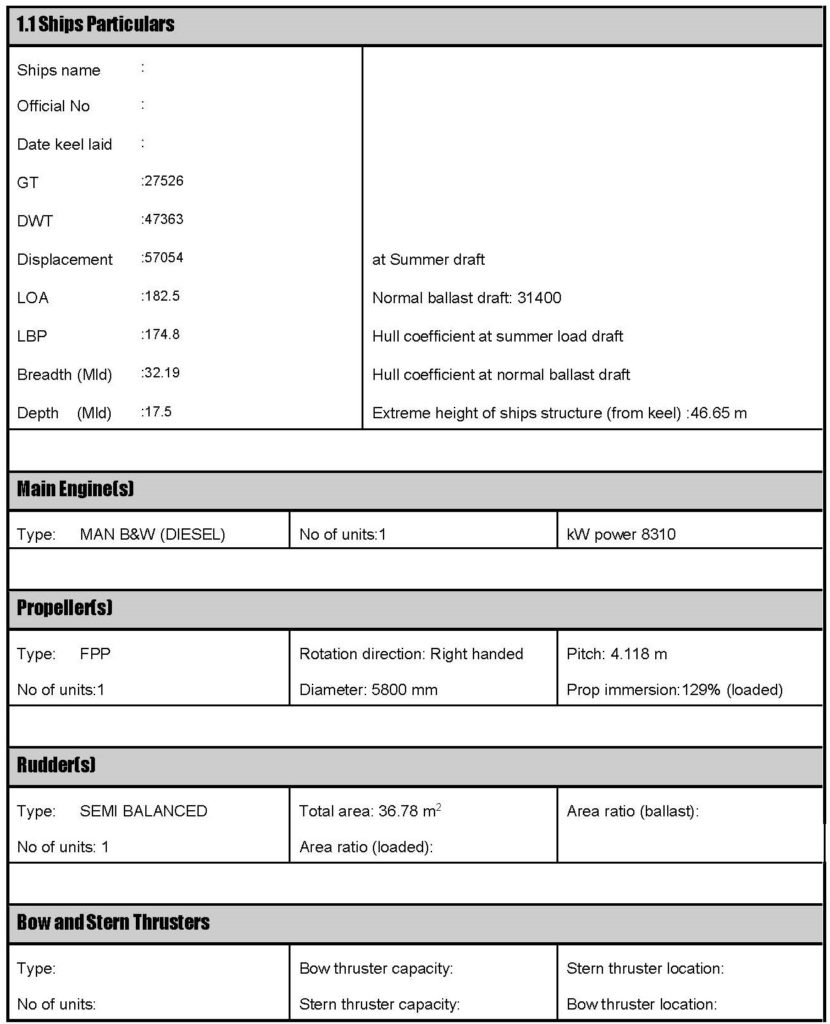
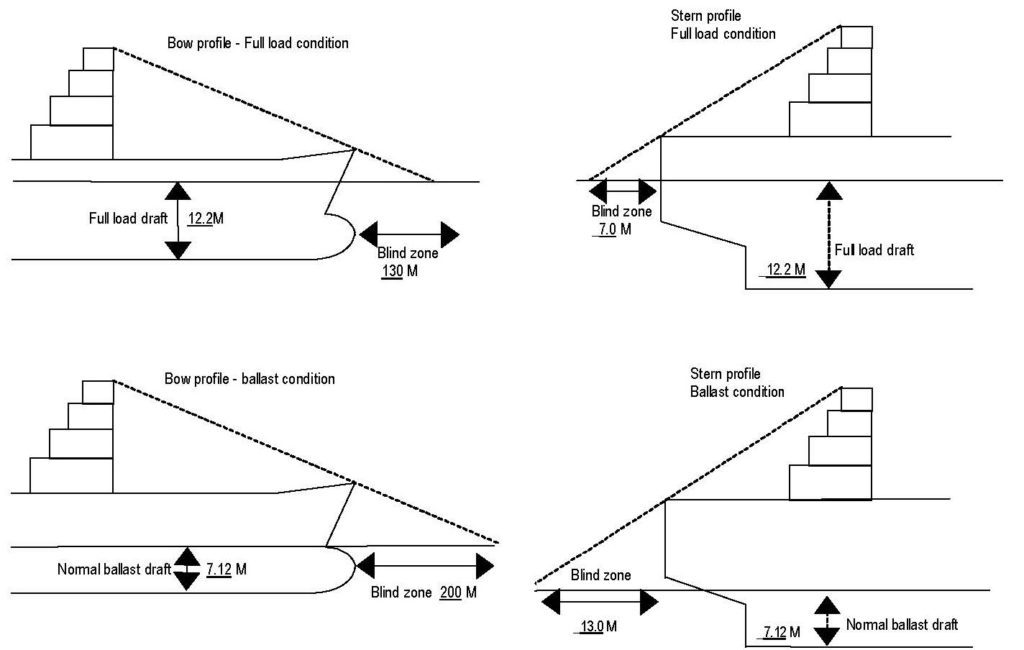
Bow & Stern Profiles
Other Hull Particulars

Main Engine Characteristics

Manoeuvring Characteristics In Deep Water
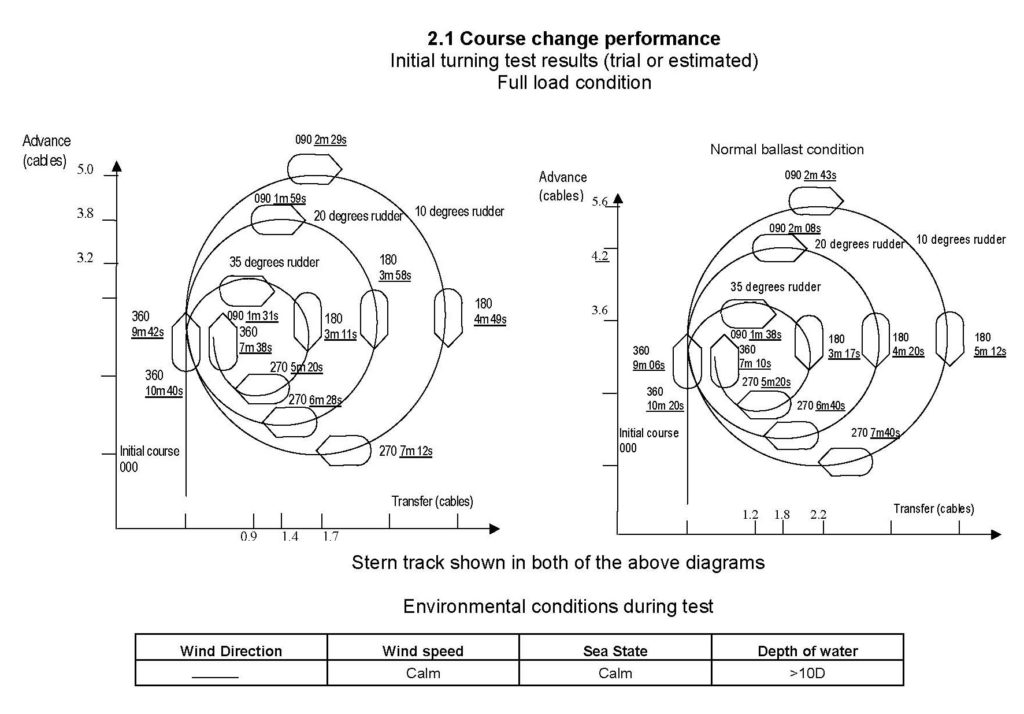
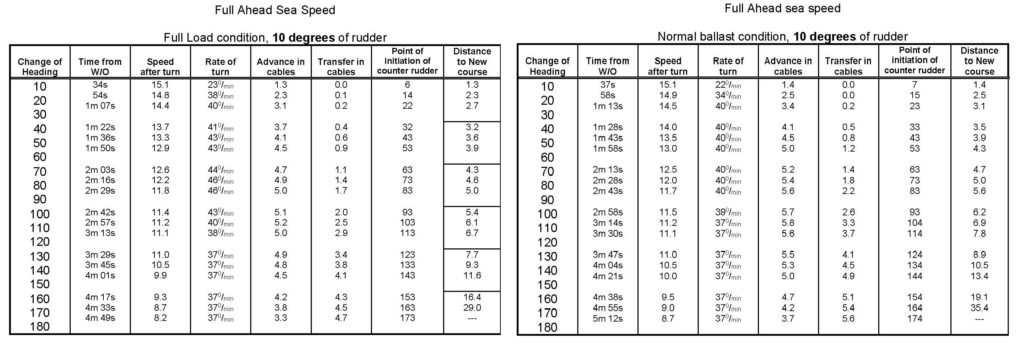
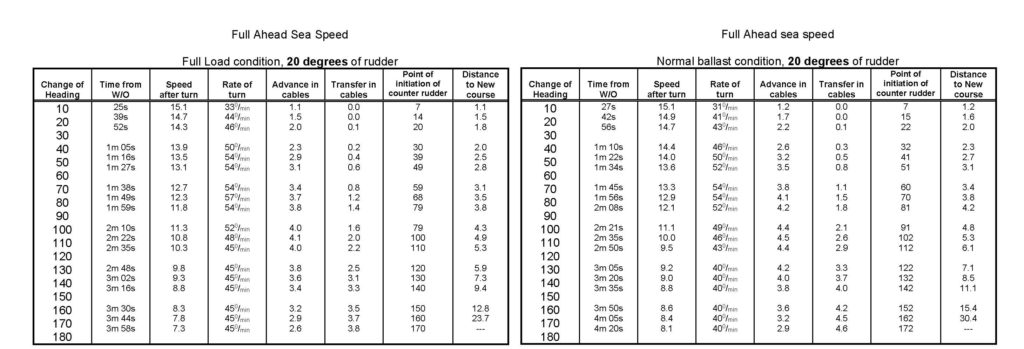
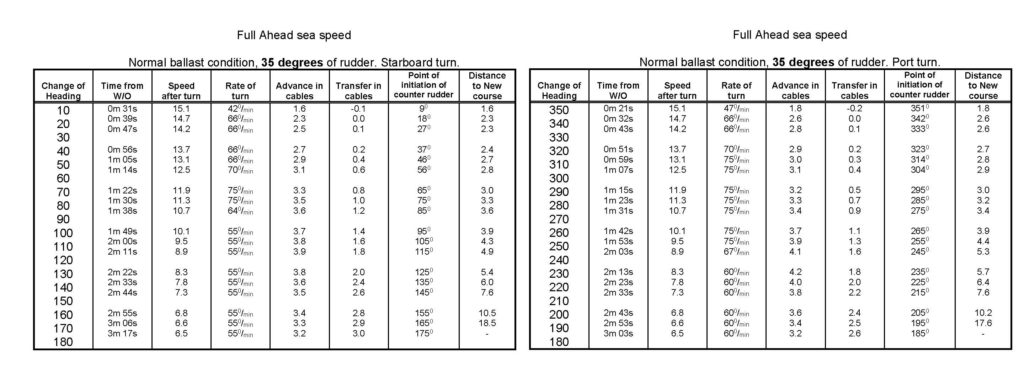
a) Table of course change test results For 10°,20° & 30°
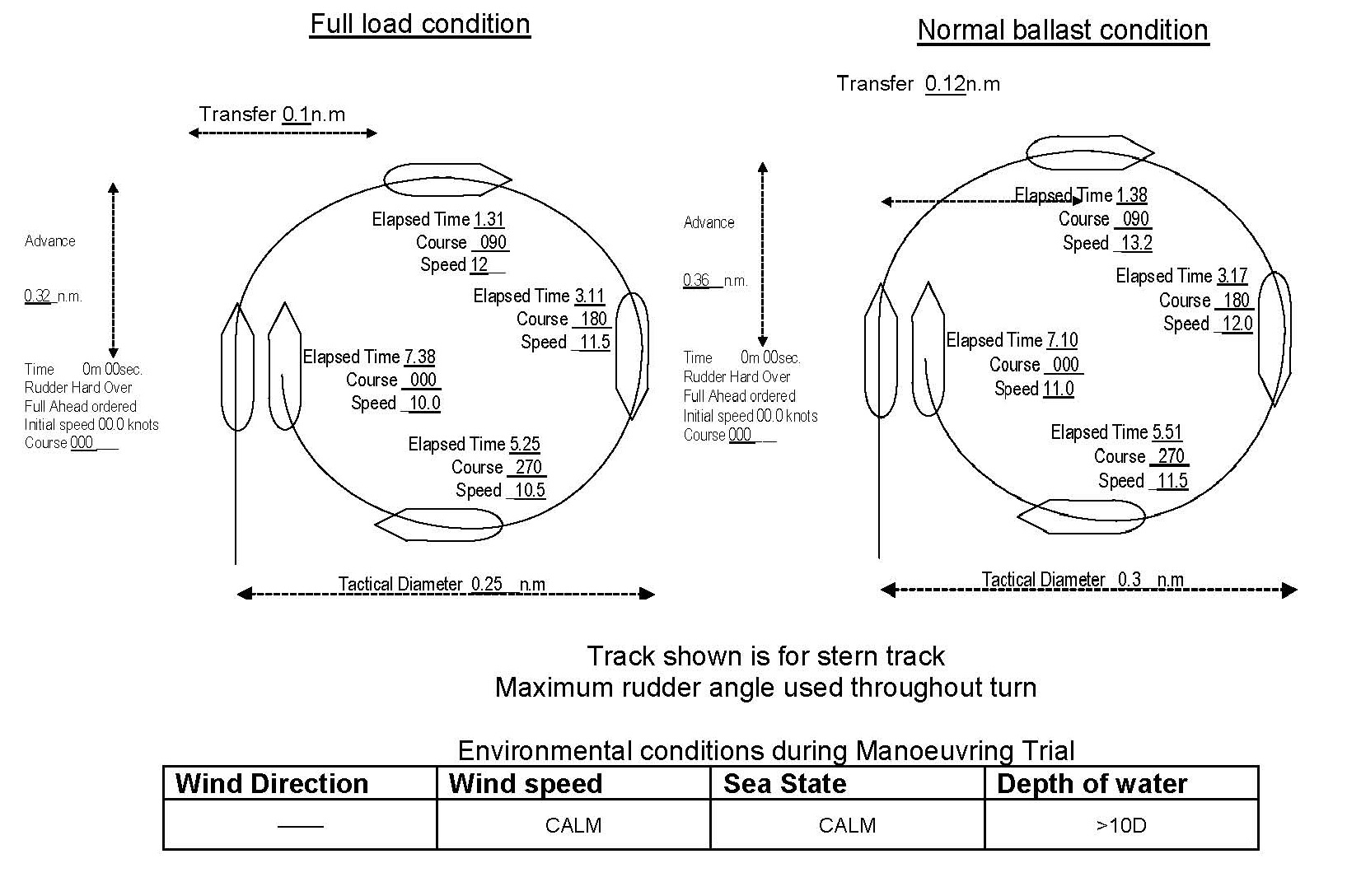
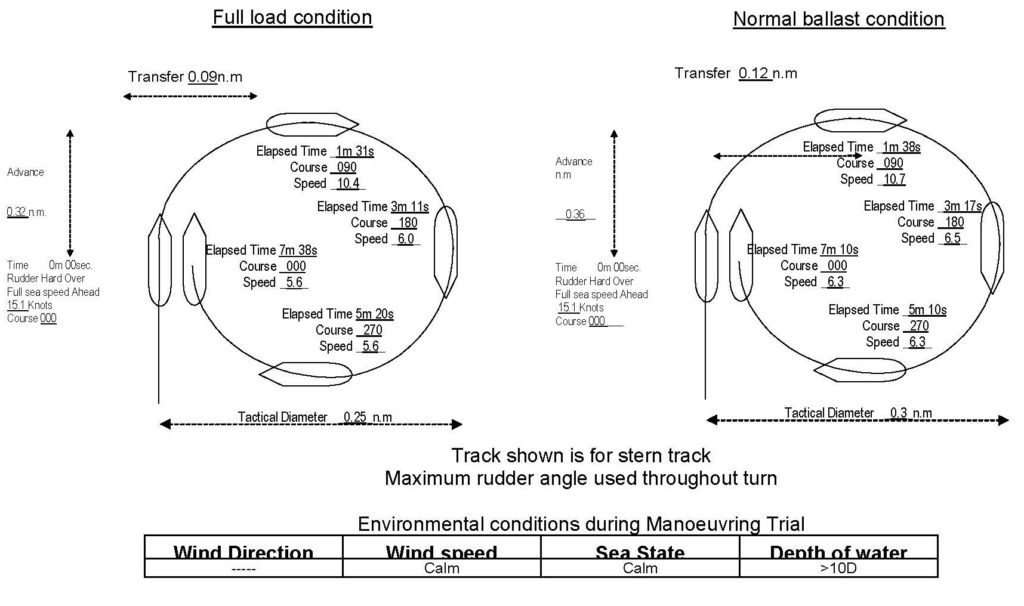
b) Turning circles in deep water
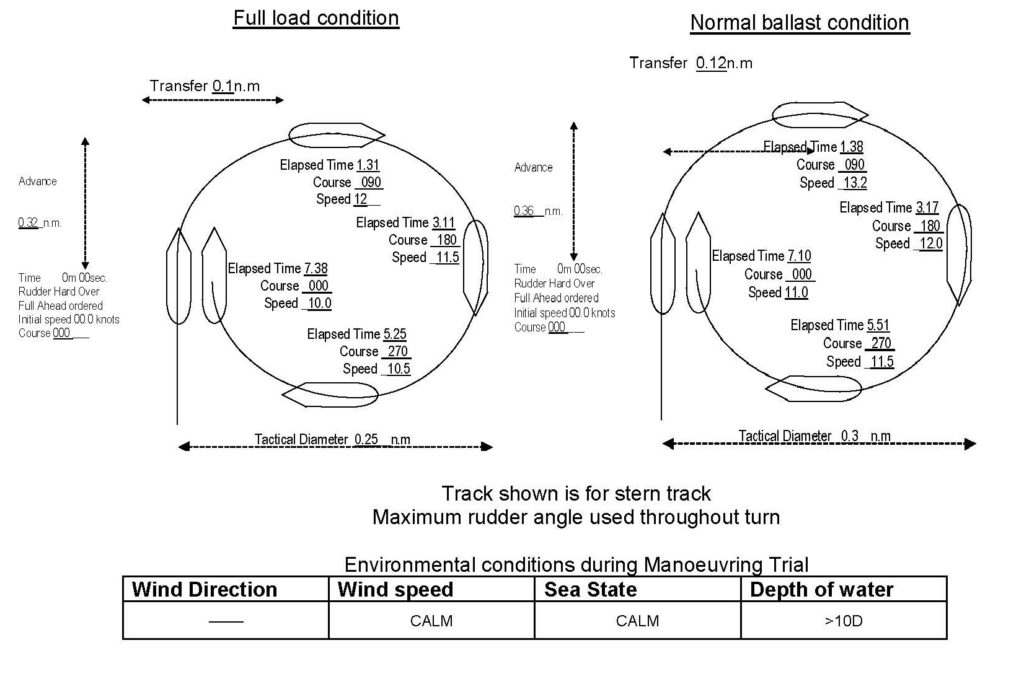
c) Accelerating turn
d) Zig Zag Manoeuvre
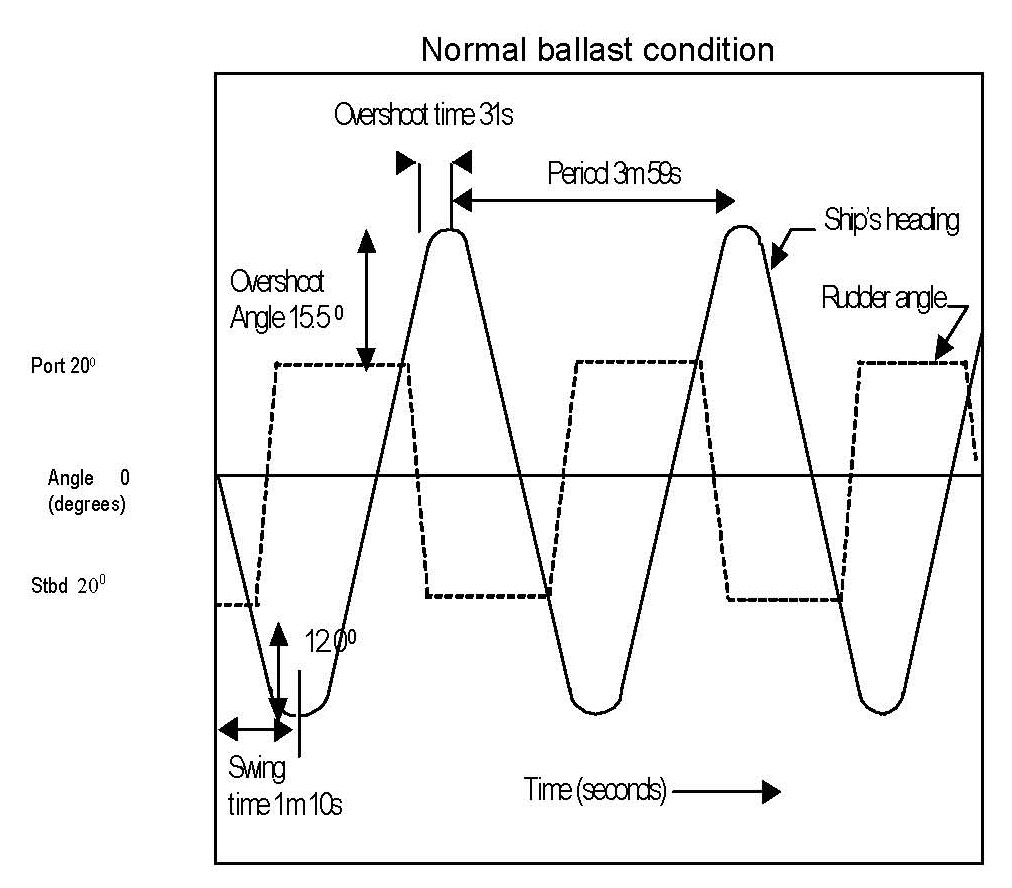
The manoeuvre provides a qualitative measure of the effectiveness of the rudder to initiate and check changes of heading.
The manoeuvre is performed in the following manner:-
With the ship steaming at a uniform speed and on a constant heading a nominal rudder angle, say 20 degrees, is applied as quickly and as smoothly as possible and held constant until the ships heading has changed by 20 degrees (check angle) from the base course. At this point 20 degrees of opposite rudder is applied and held until the ship’s heading has crossed the base course and is 20 degrees in the opposite direction, the rudder is then reversed as before.
This procedure is repeated until the ship’s head has passed through the base course 5 times. During the manoeuvre the ship’s heading and rudder angle are recorded continuously. The usual rudder angle/check angle used is 20 degrees/20 degrees but other combinations are 5 degrees/20 degrees and 10 degrees/20 degrees.
The main parameters used for comparison are the overshoot angle, overshoot time and the period.
e) Pull out manoeuvre

The pull out manoeuvre was developed as a simple test to give a quick indication of a ship’s course stability.
The ship is held on a steady course and at a steady speed. A rudder angle of approximately 20 degrees is applied and the ship allowed to achieve a steady rate of turn; at this point the rudder is returned to midships. The rate of turn is now allowed to decay with the rudder held amidships.
If the ship is stable the rate of turn will decay to zero for turns to both port and starboard. If the ship has a steering bias, then port and starboard turns will decay to the same small rate of turn on whichever hand the bias exists. If the ship is unstable then the rate of turn will reduce to some residual rate of turn as shown in the diagram.
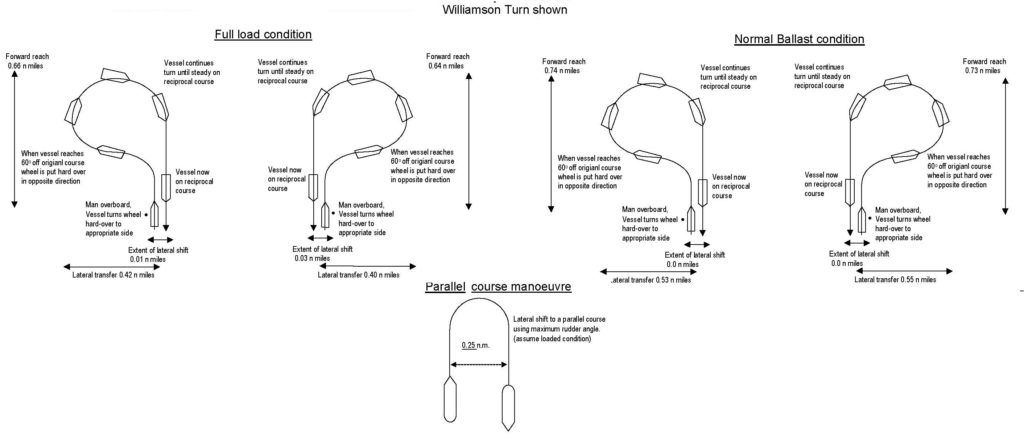
f) Man-overboard and parallel course manoeuvres
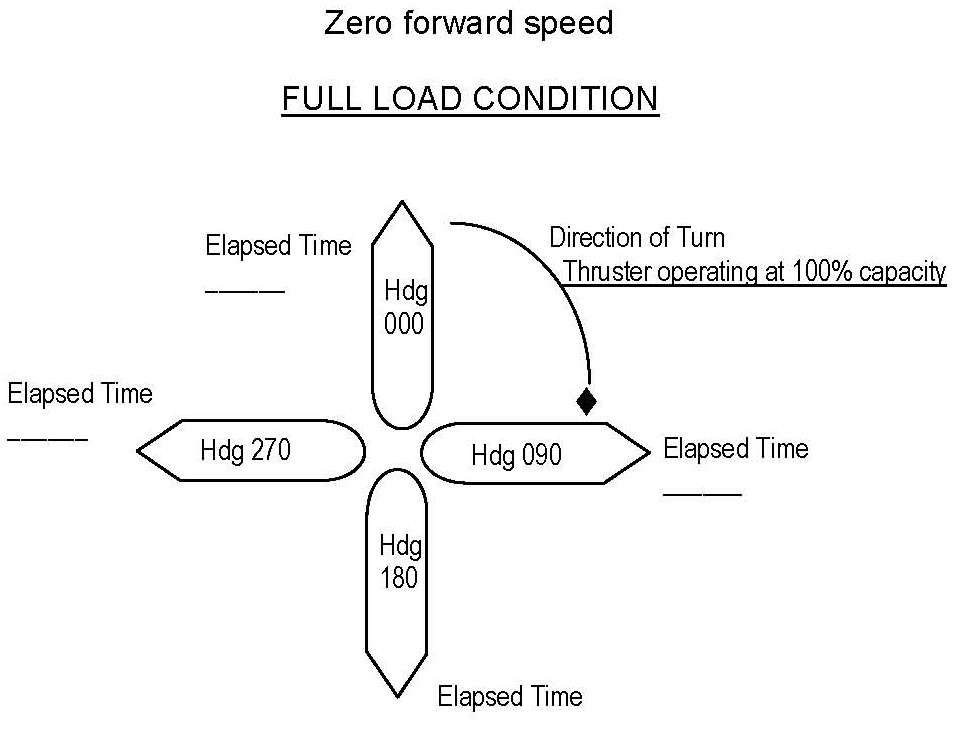
g) Lateral thruster capabilities
Stopping And Speed Control Characteristics In Deep Water
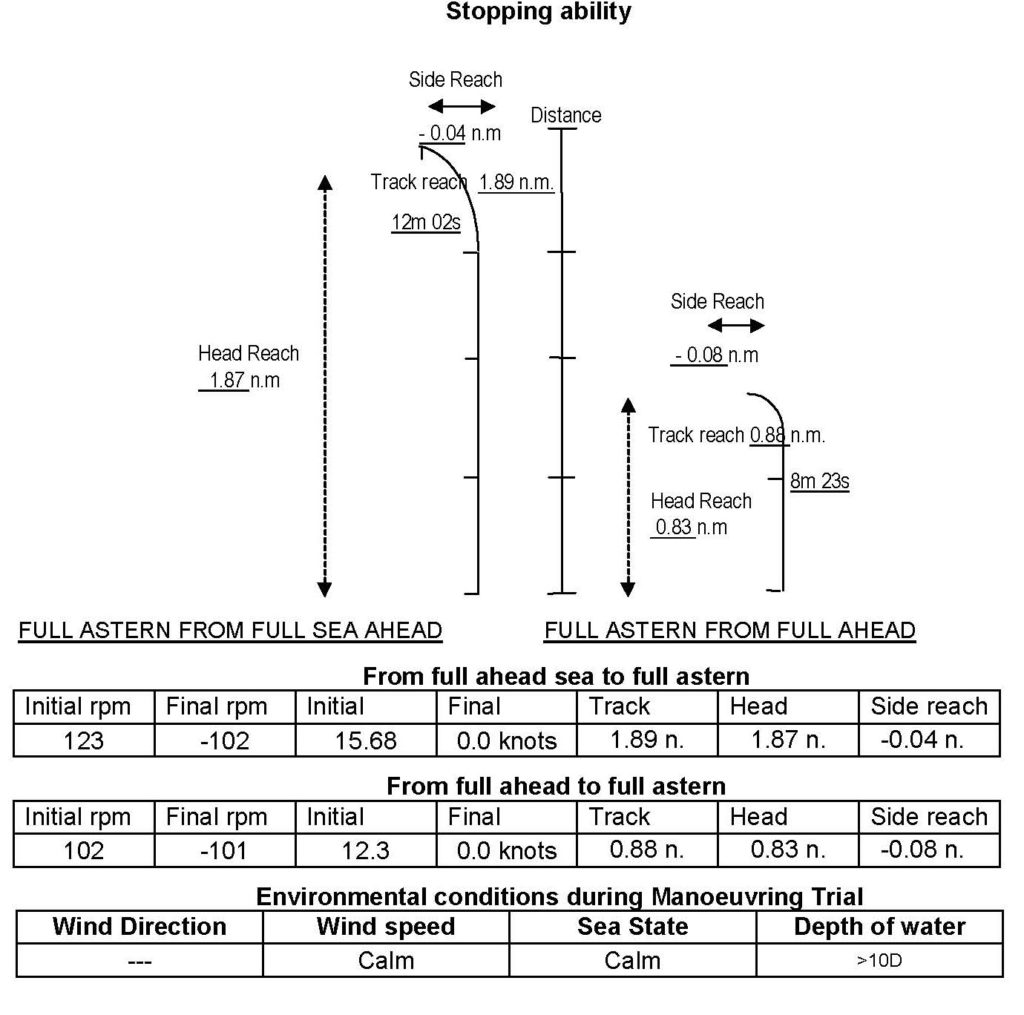
a) Stopping ability
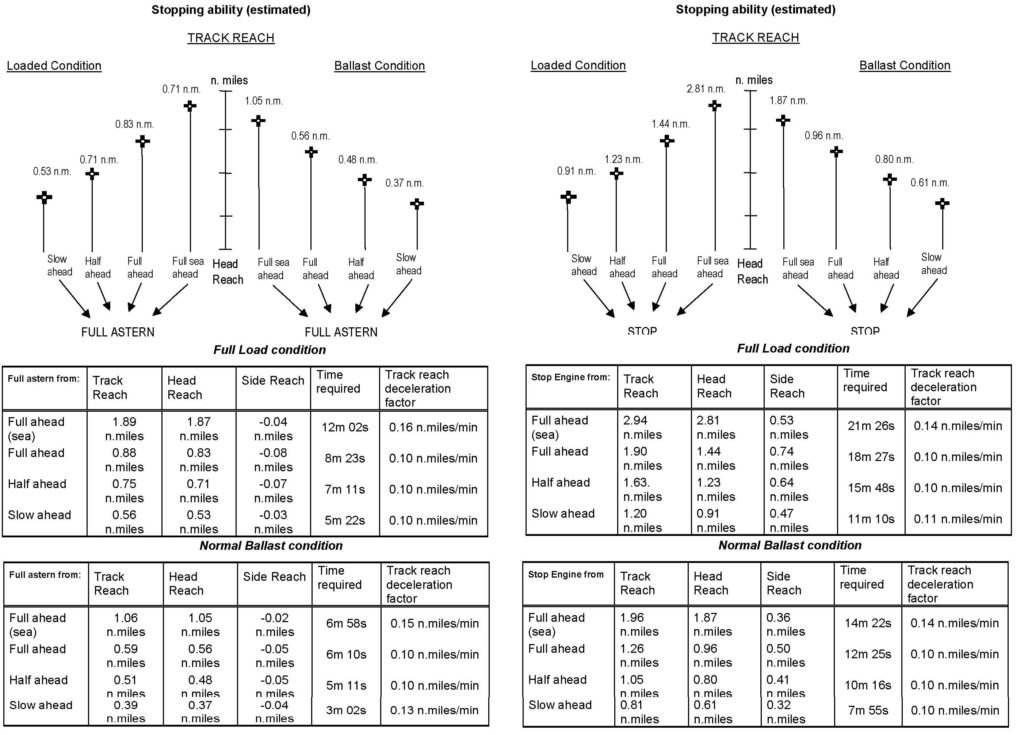
b) Deceleration and Acceleration performance
Manoeuvring Characteristics In Shallow Water
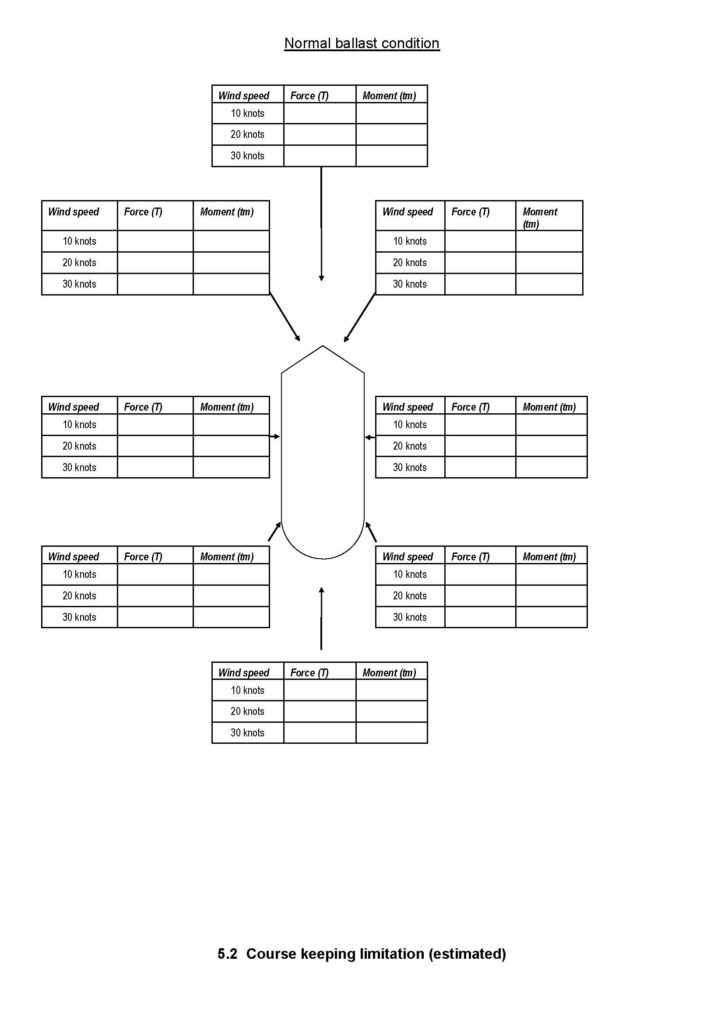
Manoeuvring Characteristics In Wind
Course keeping limitation