
Sextant

A sextant is an instrument used to measure the angle between any two visible objects. Its primary use is to determine the angle between a celestial object and the horizon which is known as the object’s altitude.
Using this measurement is known as taking a sight and it is an essential part of celestial navigation. A sextant can also be used to measure the angle between two terrestrial objects. The scale of a sextant has a length of 1⁄6 of a turn (60°); hence the sextant’s name (sextāns, -antis is the Latin word for “one sixth”).
Being of double reflection, the arc is divided into twice the number of degrees, which it actually contains, and angles up to 120º can be measured and read off from an arc of 60º. The arc is graduated to more than 120º at one end and a little beyond 0 at the other end.
Readings taken from beyond the arc at 0 are said to be “off the arc.”
A sextant measures angles in any plane, vertical, horizontal or oblique.“back angle ” or ” back observation.”: If the altitude of a celestial body is not too low and it is over the land, or if for any other reason the horizon under it is not visible, back angle is taken by bringing the reflected image of the body to the horizon farthest from it.
Errors of sextant
– Error of perpendicularity:
caused if the index glass were not perpendicular to the plane of the instrument.
– Side error :
caused if the horizon glass were not perpendicular to the plane of the instrument.
– Index Error :
This error results from the horizon glass not being parallel to the index mirror when the sextant is set on zero.
– Collimation Error :
An error which results from the telescope not being parallel to the frame .
These errors may be corrected by the navigator using various adjustment points on the sextant.
The non-correctable errors on the sextant are:
– Graduation Error :
These small errors are caused by imperfections in machining the arc, cutting the limb gears, or marking the scale of the arc or micrometer drum.
– Prismatic Error :
This error is caused by the planes of a mirror not being exactly parallel.
– Centering Error :
This error results when the index arm is not pivoted at the exact center of curvature of the arc.
Of all these errors index error is the most important because it is an error which directly effects altitude measurements. Because sextant readings can be effected by changing temperatures, which tend to expand or contract the metal parts of a sextant, the navigator should determine the amount of index error at least once each day.
Index error is determined by setting the sextant near zero, pointing it at the horizon and then turning the micrometer drum slowly until the actual and reflected images of the horizon are aligned. If the sextant reads zero when the horizons are aligned, there is no error. If not, note the sextant reading when the horizons are aligned. If the reading is a positive angle (greater than 0°-00.0′) the error is said to be “on the arc.” If the reading is less than zero, or a negative angle, it is aid to be “off the arc.” If the error determined is on the arc it must be subtracted from sextant alt. If off the arc, it must be added to sextant alt.
Magnetic Compass

Our planet’s magnetic field is believed to be generated deep down in the Earth’s core.
Right at the heart of the Earth is a solid inner core, two thirds of the size of the Moon and composed primarily of iron. At approx. 5,700°C, this iron is as hot as the Sun’s surface, but the crushing pressure caused by gravity prevents it from becoming liquid.
Surrounding this is the outer core, a 2,000 km thick layer of iron, nickel, and small quantities of other metals. Lower pressure than the inner core means the metal here is fluid.
Differences in temperature, pressure and composition within the outer core cause convection currents in the molten metal as cool, dense matter sinks whilst warm, less dense matter rises. The Coriolis force, resulting from the Earth’s spin, also causes swirling whirlpools.
This flow of liquid iron generates electric currents, which in turn produce magnetic fields. Charged metals passing through these fields go on to create electric currents of their own, and so the cycle continues. This self-sustaining loop is known as the geodynamo.
The spiraling caused by the Coriolis force means that separate magnetic fields created are roughly aligned in the same direction, their combined effect adding up to produce one vast magnetic field engulfing the planet
Above gives the illusion that a big magnet is in the Earth in North- South direction with it’s poles close to geographical Poles of Earth.
Magnetic variation is the angle on the horizontal plane between magnetic north (the direction in which the north end of a compass needle points, corresponding to the direction of the Earth’s magnetic field lines) and true north (the direction along a meridian towards the geographic North Pole). This angle varies depending on one’s position on the Earth’s surface, and over time.
Magnetic deviation is the error induced in a compass by local magnetic fields, which must be allowed for, along with Magnetic variation, if accurate bearings are to be calculated.
Magnetic deviation refers specifically to compass error caused by magnetized iron within a ship. This iron has a mixture of permanent magnetization and an induced (temporary) magnetization that is induced by the Earth’s magnetic field. Because the latter depends on the orientation of the craft relative to the Earth’s field, it can be difficult to analyze and correct for it.
The sources of magnetic deviation vary from compass to compass or vessel to vessel. However, they are independent of location, and thus the compass can be calibrated to accommodate them.
The deviation errors caused by magnetism in the ship’s structure are minimized by precisely positioning small magnets and iron compensators close to the compass. To compensate for the induced magnetization, two magnetically soft iron spheres are placed on side arms. However, because the magnetic “signature” of every ship changes slowly with location, and with time and it is necessary to adjust the compensating magnets, periodically, to keep the deviation errors to a practical minimum.
( Magnetic compass adjustment and correction is one of the subjects in the examination curriculum for a shipmaster’s certificate of competency.)
The residual deviation is calculated and a DEVIATION CURVE CARD is made by Adjuster. However as the nature of cargo loaded is different the accuracy of Deviation Card should be checked frequently.
Compass cards
The first compass cards, the paper below the magnetic needle, were marked out in points. There were 32 points on these cards, matching the direction of the winds sailors were familiar with at sea. Compasses are now marked in degrees. The four main points (or cardinal points) are North, South, East, and West. The North point on most compasses is usually decorated because it is the most important direction for navigation. It is like the North Star, it is used as a marker to guide. Later the cards were made of Rice paper with brass ring at the outer circumference. Four magnetic needles were aligned in N-S direction and fixed to back of card. Keeping the card practically horizontal in all latitudes
N end of a free magnet points toward Magnetic North and also dips towards horizon depending on latitude.
The weight of the card and magnets is supported partly by the buoyancy and partly by an iridium point fitting into a sapphire bearing.
The point of support is above the centre of gravity of the card, so that when the card dips, weight of card acting at centre of gravity brings the card back to horizontal position and the card remains substantially horizontal in all latitudes.
The liquid compass
Early compasses did not have water or liquid in them and were known as dry-card compasses. Their readings were affected by shock and vibration. Liquid-filled compasses were less effected by shock, but leaked and were difficult to repair. In 1862, the first reliable liquid compass was made with a float on the card that took the weight of the needle. Compasses were later filled with alcohol because it could only freeze at low temperatures. Because of these new improvements on liquid compasses, they started to be more popular than dry-card compasses by the end of the 19th century.
The bowl is filled with a mixture of distilled water and pure ethyl alcohol thereby making the mixture to have the following properties:
· Low freezing point about -30°C
· Small coefficient of expansion
· Does not discolour the card
· Low relative density about 0.93
A lubber line is a fixed line on a compass binnacle pointing towards the front of the ship and corresponding to the ship’s centerline (being the customary direction of movement).
Gyro Compass
Free Gyroscope
A Gyroscope consists of a spinning wheel. If a spinning wheel is free to turn about two axes at right angles to each other and to the spin axis, it is said to be a free gyroscope. The important properties of Free Gyroscope are its inherent gyroscopic inertia and precession.
Gyroscope Inertia
A free gyroscope, when spinning rapidly, possesses considerable directional stability or inertia. That is it has a great resistance to any tendency to change the direction in which its spin axis lies.The earth too may be compared to a free gyroscope. The earth’s spin axis lies in the direction of the ‘pole star’.
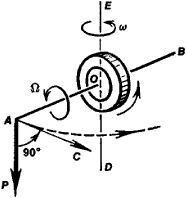
Precession
If a torque – a turning moment, in the plane of the spinning wheel is applied to a gyroscope axis, the effect is only to increase or decrease the rate of spin. The direction in which the spin axis lies is unaffected.
If a torque is applied to a gyroscope axis in a plane at right angles to the plane of spin, then the gyroscope becomes unbalanced. And to restore the balance it moves in a direction at right angles both to the plane of the spinning wheel and the plane in which the torque is applied. This movement at right angles to the torque is known as precession.
However due to the placing of this gyroscope on the surface of the earth, it will be moved along the direction of rotation of the earth. As such the gyroscope will have an apparent motion. For example, at night if the gyroscope is made to point in the direction of a star, then the gyroscope will follow the star as the earth rotates and the star apparently moves in the sky.
The characteristics of Gyroscope are combined with Earth’s Rotation and Force of Gravity, with the result that instrument aligns itself with geographic Meridian and provides a constant North indication regardless of rolling, pitching and yawing of the vessel
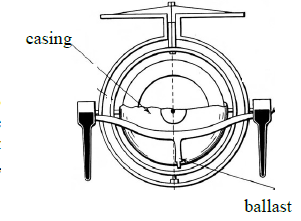
A free gyroscope may be made North seeking by attaching a weight to the rotor casing below the centre of gravity of the rotor. This so that when the axis lies horizontal the weight is distributed equally between the two ends of the axis but when the gyroscope is tilted the weight exerts more thrust on one end of the axis than on the other.
The control of a gyro by solid control weight is not used in practical compasses. Commonly used is a gravity control by a liquid ballistic, which flows between the north and south sides of the rotor under the influence of gravity, when the gyro axis tilts due to the earth turning.
The controlled gyro will never settle in the meridian. It will only oscillate about the meridian. Only in one position will the gyro axis remain pointing in a constant direction, if initially set there, and that is pointing north with a tilt such that the control precession is equal to the drifting.
Damping
Damping means the process by which these oscillations about the meridian will grow lesser and lesser until the axis is pointing along the meridian and even if destabilized will return to the meridian.
Damping may be achieved by the provision of:
*A precession in azimuth (towards the meridian), or
*A precession in tilt (towards the horizon).
The Gyro Compass for ships use 2nd Method
This is achieved by connecting the Mercury ballast slight to the east of vertical centerline. With this arrangement the major effect of mercury still acts about horizontal axis , causing Gyro to precess towards meridian. But there now is a small additional effect about the vertical axis, causing gyro to precess about Horizontal axis.
This introduces a tilt of Gyro which Is opposite to the natural tilt resulting from ‘Apparent Rotation’, The end of Axle will . therefore follow a SPIRAL PATH as shown in figure.
The Reduction of oscillation about the vertical axis is called DAMPING.
Now the only position of rest which Gyro can find at Equator will be with it’s axle horizontal and Pointing towards Geographical North.
Latitude Error
At a point north of the equator the north end of the gyro axle tends to turn toward the east and rise This error is proportional to the tangent of the latitude, as the latitude approaches 90° the tangent approaches infinity.
No attempt is made in the gyro-compass to compel the axle to seek a resting place at variance with its natural settling position. Instead, a latitude adjustment is provided which moves the lubber-ring the necessary amount to cause the compass indication to be true. This is achieved by a turning knob on the gyrocompass control panel and has to be set depending on the latitude the vessel is in.
Course, Speed and Latitude Error
The compass will settle with respect to a false meridian if the vessel is moving with a velocity, which has a northerly or a southerly component.
Such a movement would produce a false tilting of the spin axis However if the movement were in the east – west direction then this would not occur.
The error is given by:
Error in degrees = (velocity x cosine course) / (5 π cosine latitude)
The error (A) may be found from a vector triangle. Since it is a small angle, it is given in radian measure:
A = S. cos. Course/900 cos. B
(S = speed in knots, B = latitude)
Or in degrees:
A˚ = (S. cos. Co. /900 cos. B) x (180/π)
A˚ = S. cos. Co. / 5 π cos. B
To compensate for steaming error, a speed rider is provided, which in association with the latitude rider, shifts the lubber line equal to steaming error in the appropriate direction.
It can be calculated from formula, or can be read off from Speed Correction Table.
Advantages of Gyro against Magnetic Compass
*Seeks True Meridian, hence no need to apply variation (which is not exactly known)
* It is not affected by ship’s magnetism. Therefore if an error does exist in Gyro, it is same on all headings
* Gyro heading can be transmitted electronically to other instruments.
Limitations of Gyro
*Needs constant power source, hence power failure will cause it to stop working.
* If operation interrupted for long, as much as 4 hrs may be required for it to settle.
* Gyro accuracy decreases drastically in latitudes above 75 deg
* Maintenance and repairs are expensive
Auto Pilot

Hand steering is accomplished when a navigator instructs the helmsman to steer a demanded heading with reference to gyrocompass or magnetic compass heading.
The helmsman visually assesses the difference between the demanded course and the direction of the vessel’s heading as indicated by the compass Lubber line. This difference should be minimized to maintain a steady course. To achieve this, the helmsman turns the steering wheel which actuates the steering gear and drives the rudder. The movement of the rudder can be observed on the “rudder angle indicator”.
When the vessel’s heading begins to swing towards the demanded heading, the helmsman would turn the wheel back to “mid ships” or may apply “counter rudder” by moving the wheel to the opposite direction allowing the heading to be maintained as demanded without overshoot”. The overall performance of hand steering is influenced greatly by the ability and the visual reactions to the external environment.
The Marine autopilot, therefore, has to be somewhat similar to an experienced helmsman. And the optimum performance is achieved by correct input of parameters such as “Rudder limit”(or “Rudder”), “Counter Rudder” ,“Yaw”, “Off course Alarm” etc.
“Rudder Limit” control limits the rudder angle in an infinite manner between approximately 5 degrees and maximum angle set by the limit switch. High setting allows faster course changes. A 15 degree Rudder limit is usually sufficient for normal course keeping and heading changes.
“Rudder ratio” determine the rudder angle for each degree of heading deviation. Set as low as possible to avoid vessel wandering from desired heading. A higher setting is required for a fully laden vessel or when a vessel is operating at reduced speed. Too high a setting, without further control features, can cause oscillations about the desired heading.
“Counter Rudder” setting provides damping and reduction of setting time if the vessel changes heading and tends to overshoot and cause oscillation about the demanded heading. A vessel in ballast usually requires less counter rudder.It determines amount of counter rudder to steady the ship on set course & Keeps over shoot to minimum. Greater the ship’s inertia, greater the setting required. If ship has good dynamic stability, relatively small settings of counter rudder will be sufficient. If the ship is unstable, higher settings will be required.Depends on ship’s characteristics, loaded/ballast conditions and rate of turn.
“Yaw” Control :The yawing of a vessel causes elongation of the distance to go and the consequent higher frequency of rudder movement produces drag which reduces the speed. Low gain is required to reduce the frequency of the rudder movement. Therefore proper setting of “Yaw” Control is a very important in any Marine Autopilot.
“Off course Alarm” actuates an audible alarm to alert the navigator if the heading deviates outside the bandwidth of the setting.
Weather Setting Control : When steering in heavy weather with wind and sea at an angle to the vessel’s heading, there is a tendency for the vessel’s head to be turned in a particular direction. The effect of this can be offset by maintaining some permanent value of rudder angle; this angle is set using ‘weather helm’ after a period of trial and error.
Synchronisation Control: Temporairly disconnects gyro repeater from main gyro for sync of heading. Required for sync and when gyro switched off and restarted.
Course Selector Knob: For setting course to be steered.
Dimmer: For illumination of panel
Auto/Follow Up/ Non Follow Up : For choosing steering mode
Changing over from Hand Steering to Auto Steering :
Before changing over from hand steering to auto steering, the settings on the auto pilot panel must be adjusted for weather and traffic conditions.
The vessel must be made steady on the course on which she has to be set on auto steering.
Changing over to emergency steering system :
When the steering panel gives an alarm, it must be read carefully to see as to what has gone out of order, operation must be changed-over to the other/ alternative steering gear/ motor or transmission system/telemotor, engineroom must be informed immediately.
If the Auto-pilot gives an alarm or the off-course alarm goes off, adjust the settings on the Auto-pilot panel accordingly.
If the Auto-pilot fails, change-over to hand steering.
If the Follow-up system doesn’t work (the feedback leg of the steering gears doesn’t function properly), change-over to Non-Follow-Up mode.
If the steering transmission systems or telemotors stop working, emergency steering has to be performed by trick-wheel arrangement or solenoids after bringing the rudder mid-ships.
Further, if the steering hydraulic or electric motors also stop working, rudder will have to turned by some mechanical arrangement like chains and blocks, this is not possible in case of large rudders (large ships). As the last resort, Jury rudder is used, which means some arrangement/ structural changes, which overside work as an alternative rudder arrangement e.g. wooden planks on the stern turned/ rotated like a rudder.
Use of the Automatic Pilot
(1) The master shall ensure that an automatic pilot, where fitted, shall not be used in area of high traffic density, in conditions of restricted visibility nor in any other hazardous navigational situation unless it is possible to establish manual control of the ship’s steering within 30 seconds.
(2) Before entering any area of high traffic density, and whenever visibility is likely to become restricted or some other hazardous navigational situation is likely to arise, the master shall arrange, where practicable, for the officer of the watch to have available without delay the services of a qualified helmsman who shall be ready at all times to take over the manual steering.
(3) The change-over form automatic to manual steering and vice versa shall be made by, or under the supervision of, the officer of the watch, or, if there is no such officer, the master.
(4) The master shall ensure that the manual steering gear is tested (a) after continuous use of the automatic pilot for 24 hours and (b) before entering any areas where navigation demands special caution.
(5) In areas where navigation demands special caution, the master shall ensure that the ship shall have more than one steering gear power unit in operation when such units are available and capable of simultaneous operation.
Steering Gear – Testing and Drills
The master shall, within 12 hours before departure of the ship, cause the steering gear to be checked and tested so as to ensure that it is working satisfactorily:
Provided that in the case of ships regularly making more than one voyage a week to or from the same port a check and test of the steering gear need only be made once in that week unless a part of the steering gear or its control system has been dismantled or change since the last test.
The test procedure shall include, where applicable, the operation of the following:
(a) the main steering gear;
(b) the auxiliary steering gear;
(c) the remote steering gear control systems
(d) the steering positions located on the navigating bridge
(e) the emergency power supply
(f) the rudder angle indicators in relation to the actual position of the rudder
(g) the remote steering gear control system power failure alarms
(h) the steering gear power unit failure alarms; and
(i) the automatic isolating arrangements and other automatic equipment required for steering gear.
The checks and tests shall include:
(a) the full movement of the rudder according to the required capabilities of the steering gear;
(b) a visual inspection of the steering gear and its connecting linkage; and
(c) the operation of the means of communication between the navigating bridge and the steering gear compartment.
The owner shall provide simple operating instructions, with a block diagram showing the changeover procedures, for the remote steering gear control systems and steering gear power units, and the master shall ensure that they are permanently displayed on the navigating bridge and in the steering gear compartment.
A person shall not supervise the operation or maintenance of the steering gear unless that person is familiar with the operation of the steering systems fitted on the ship, and, where applicable, with the procedures for changing form one system to the other.
In addition to the routine checks and tests prescribed in above paragraphs, the master shall ensure that emergency steering gear drills which practice emergency steering gear procedures take place at least once every three months. These drills shall include, where applicable, use of direct control form within the steering gear compartment, communications procedure with the navigating bridge and the operation of alternative power supplies.
The date time and place that the said routine checks and tests are carried out and the date and details of emergency steering drills carried out shall be recorded by the master in the official logbook.
In ships not required to keep an official logbook, a record of each check, test and drill shall be made by the master and be retained on board for a period of six months and be available for inspection on demand by a superintendent, proper officer or surveyor of ships.
Electromagnetic Log

This type of log consist of
1. Master Indicator
2. Preamplifier
3. Sensor
Operations
The sensing of speed makes use of law of electromagnetic induction. When the ship moves, the water passing through the hull acts as a conductor. The magnetic field is produced by a solenoid, installed in such a way as to allow the field to extend into water.This produces an EMF (electromagnetic force), which is measured and converted into the speed of vessel through the water.
Principle
The electromagnetic log is based upon the Faraday-Maxwell induction law;
The induced e.m.f. ‘E’ is given by the following:
E = F x L x V
Where F = the magnetic field
L = the length of the conductor
V = the velocity of the conductor through the magnetic field.
In the EM log a direct current through the windings of a coil, generates a magnetic field. If the conductors do not move relative to the coil they do not intersect the magnetic fines of force and no voltage is induced in them.
In the EM log the ‘F’ and ‘L’ are maintained constants, therefore the induced e.m.f. is directly proportional to the velocity ‘V’, which is the velocity of the vessel through the water.
The direction of the voltage E depends on the directions of the lines of force and the direction of the velocity of the conductor water. According to the formula the induced voltage is proportional to the velocity V.
Should the velocity have the opposite direction, the direction of the voltage would change too.
Alternating current through the coil Instead of a direct current, suppose that we send an alternating current through the coil. Then the induced voltage that we will have would be also an, alternating voltage with amplitude that is proportional to the velocity, V.
For the electromagnetic log an alternating voltage is preferred to a direct voltage.
The speed out put from an EM log depends upon the water flow by way of the sensors. Thus siting of the probe is critical. This is so since if too close to the hull then due to the non-linearity of the hull form the speed of the water flow may give a wrong representation of the vessels speed. This is minimized by careful siting of the sensor as well as by calibrating the instrument while installation.
Pitch and roll also give rise to errors however these are reduced by having an electrical time constant that is longer than a period of vessel motion.
A well-adjusted log can have an accuracy of better than 0.1 percent of the speed range,This type of log can give only speed through water and is greatly affected by the current flowing under the ship.
In all the above logs the flow of water past and under the hull play a major part in the accuracy of the readings.
Doppler Log

The Doppler effect is a frequency shift that results from relative motion between a frequency source and a listener.
If both source and listener are not moving with respect to each other (although both may be moving at the same speed in the same direction), no Doppler shift will take place.
If the source and listener are moving closer to each other, the listener will perceive a higher frequency -the faster the source or receiver is approaching the higher the Doppler shift.
If the source and listener are getting farther apart, the listener will perceive a lower frequency – the faster the source or receiver is moving away the lower the frequency.
The Doppler effect is a frequency shift that results from relative motion between a frequency source and a listener.eed the wave travels.
The Doppler log is based on measurement of the Doppler effect. It is seen that an observer, moving with a source of sound towards a reflecting plane, receives a frequency:
fѵ = f{(c+v)/(c-v)}
Where fv is the received frequency, f the transmitted frequency, c the speed of sound and v the speed ofthe source of sound.
By measuring fv and knowing f and c, the speed of a ship with regard to the seabed can be determined.
Above can be simplified to;
fd = 2vft / c
where
fd = Doppler frequency shift in cycles per second,
v = relative speed in the direction of the transmitted wave,
ft = transmitted frequency, and
c = velocity of propagation of the radio wave.
Principle
A transmitting transducer below the ship continuously emits a beam of sound vibrations in the water at an angle (usually 60˚ to keel) in the forward direction.
A second transducer aboard receives the echo caused by diffuse reflection from the seabed.
A Doppler log uses a higher frequency than an echo sounder.
Advantages:
1.The resulting shorter wavelength leads to the more diffuse reflection desired; the echo from
a specular reflection would not be received, in view of the oblique incidence of the beam.
2.The shorter wavelength makes possible a smaller beam-angle and so avoids the dimensions of the radiating face of the transducer becoming too large.
3.The emitted power of the sound vibrations spreads less and thus the echo is stronger.
Every point of the seabed hit by the beam causes a stronger or weaker echo in the direction of the receiving transducer.
Hence, though the distance between the ship and the seabed does not change, the received frequency will differ (owing to the Doppler effect) from the transmitted frequency.
From the Doppler frequency-shift, which can be measured, the speed v of the vessel can be found.
The speed of sound waves in the water ‘c’ depends, however, on the temperature and (to a smaller degree) on the salinity and the water pressure.
For that reason a thermistor is mounted near the transducers. (A thermistor is a resistance, the magnitude of which depends on the, temperature.) Deviations of the sound speed ‘c’ from the normal value are passed to the system computer for correction of its calculations. The propagation time of the pulse and its echo plays no role.
Reflections
Both the echo sounder and the Doppler log react to reflections of sound waves from the seabed; the former measures the propagating time and the latter the difference of the two frequencies.
If the beam is propagated from one water layer into a second one of different composition or
temperature, there will be reflection; there will also be a Doppler effect if the second layer moves relative to the first layer and if the beam hits this layer obliquely.
In that case the frequency of the sound vibrations penetrating the second layer will also change, if the speed of the sound waves in the second layer is different from that in the first layer.
For the echo, however, the reverse frequency change will occur and will cancel out the first change.
A Doppler log measures the algebraic sum of all Doppler frequency shifts experienced by the sound on its way to the bottom (or to a reflecting layer) and back again.
To this frequency shift must be added the shift that arises at the transition of the transducer vibrations between the ship and the water, and vice versa. If the beam hits the bottom (bottom lock) the total frequency shift is, proportional to the speed of the ship with regard to the bottom.
If there is no bottom contact, but only reflection against a water layer, the measured Doppler shift is proportional to the speed of the ship relative to that water layer (water lock).
Janus configuration
Given a propagation angle of 60°, cos 60 = 0.5
As fd =2vftcos60/C = vft/C
It follows that if the angle changes, the speed calculated will be in error because the angle of propagation has been applied to the speed calculation formula in this way. If the vessel is not in correct trim (or pitching in heavy weather) the longitudinal parameters will change and the speed indicated will be in error. To counteract this effect to some extent, two acoustic beams are transmitted, one ahead and one astern. The transducer assembly used for this type of transmission is called a ‘Janus’ configuration after the Roman god who reputedly possessed two faces and was able to see into both the future (ahead) and the past (back).
A 3° change of trim on a vessel in only forward pointing Doppler system will produce a 5% velocity error. With a Janus configuration transducer system, the error is reduced to 0.2% but is not fully eliminated.
The addition of a second transducer assembly set at right angles to the first one, enables dual axis speed to be indicated .
The placing of the two transmitting transducers, to produce forward and backward beams is called a Janus configuration.
Due to the Janus configuration a linear relationship exists between the speed of the vessel and the measured frequency shift.
A further advantage is that vertical movements of the ship cause equal changes to the Doppler shifts in the forward and backward beams, so the difference remains the same.
Vertical movements of the ship do not therefore influence the Doppler shift.
For measuring the athwart ship speed, a similar Janus configuration is mounted at an angle of 90 deg. with the along ships transducers;
Pitching and rolling
the Doppler measurement of the speed is not, in practice, influenced by pitching. The same applies to the two athwartships beams during rolling.
It has been taken for granted that the transmitting transducers generate vibrations continuously, thus making it necessary for each beam to have a separate transmitting and receiving transducer.
This is called a continuous-wave (c.w.) system. Transmitting and receiving transducers are of identical construction.
Other types are pulse systems. In such a system a transducer generates pulses and the same transducer receives the echo between the transmissions. Therefore a pulse system needs only half as many transducers as a continuous-wave system.
In the continuous-wave system the reception of the echo can be disturbed by the continuously emitted vibrations of the transmitting transducer going directly from transmitting to receiving transducer (cross noise or feedback).
With pulse systems this cannot occur, since a pulse is transmitted only after the echo of the preceding pulse has been received, and the receiver is blocked during the transmission.
The majority of Doppler logs in use are pulse systems
Transducers
The angle of the along ships beams is about 3 deg., that of the athwart ships beam is about 8 degrees.
The frequency used is 100 to 600 kHz – newer models have a transmission frequency of may be 2 MHz.
The surface area of each transducer need then be only about 10 cm2.
The high frequency and the concave shape of the surface also lead to a small beam angle.
The higher frequency influences the reflection and the absorption but not the speed of propagation.
The transducers are of the Electrostriction type.
Usually the transducers are inserted in a ‘sea chest’ or ‘sea well’, permitting their removal for repairs or replacement without the ship requiring dry-docking.
Measurement of ship’s speed relative to bottom or to water
Owing to absorption by particles in the water at a depth of 200 to 400 metres, the so-called deep scattering layer (DSL), a Doppler log may only function, down to about 200 metres, unless the set is equipped to work in the layer of 10-30 metres below the surface.
When reflections are received from this layer the speed of the ship relative to that layer, and not relative to the bottom, is obtained. Thus uncertainty and confusion may occur.
Apart from the effect of the Deep Scattering Layer, the water at 10 to 30 metres below the keel also causes an echo and Doppler effect by volume-reverberation.
This is called ‘water track’ (as opposed to ‘bottom track’). In deep water there is a considerable difference between the time of propagation for bottom reflection and that for reflection from the mass of after at a depth of 10 to 30 metres. Receivers can be made operative for only a short period (a certain ‘window’ of time) either immediately after or a short time after each pulse transmission.
Suppose that the receiver has bottom contact, with the window occurring a short time after transmission.
If the Doppler log then loses bottom contact, the window is automatically shifted to occur immediately after pulse transmission.
As a result, the receiver reacts only to reflections from the 10-30-metre water layer. When this happens, ‘bottom track’ indicator is replaced by ‘water track’.
In some Doppler log, it is possible to switch manually to the water track mode.
Uses of the Doppler log
It is very useful during docking of Large vessels as it also gives athward ship speed.
The Doppler log can measure the speed to the nearest 0.01 knot or 5 mm/s; unfortunately, however, it sometimes does not function correctly during docking if the screws of tugs cause air bubbles (which reflect sound waves) to pass through the beams (aeration).
It functions well for all speeds that modern vessels can attain and works from a minimum depth of about 1.5 feet to a maximum depth of about 600 feet.
The Doppler system can be connected with other electronic navigation systems providing generally accurate speed input.
ERRORS
There are primarily four errors to be aware of when using the Doppler system with Janus configuration:
1. Transducer orientation error caused when the pitching or rolling of the vessel becomes excessive
2. Vessel motion error caused by excessive vibration of the vessel as it moves through the water
3. Velocity of sound errors due to changes in water temperature or density due to salinity and particle content
4. Signal loss errors caused by attenuation of the vibrations during transit through the water or upon reflection from the bottom
The navigator should be cautioned, that precise speed should be determined not only by using the Doppler but also from careful calculations of distances be tween accurate navigational fixes .
Automatic Identification System (AIS)

The Automatic Identification System (AIS) is an automatic tracking system used on ships and by vessel traffic services (VTS) for identifying and locating vessels by electronically exchanging data with other nearby ships,
Basic overview
AIS transponders automatically broadcast information, such as their position, speed, and navigational status, at regular intervals via a VHF transmitter built into the transponder. The information originates from the ship’s nav sensors, typically its global navigation satellite system (GNSS) receiver and gyrocompass.
Other information, such as the vessel name and VHF call sign, is programmed when installing the equipment and is also transmitted regularly. The signals are received by AIS transponders fitted on other ships or on land based systems, such as VTS systems. The received information can be displayed on a screen or chart plotter, showing the other vessels’ positions in much the same manner as a radar display.
An AIS transponder normally works in an autonomous and continuous mode, regardless of whether it is operating in the open seas or coastal or inland areas. AIS transponders use two different frequencies, VHF maritime channels 87B (161.975 MHz) and 88B (162.025 MHz)
In order to ensure that the VHF transmissions of different transponders do not occur at the same time, the signals are time multiplexed using a technology called Self-Organized Time Division Multiple ccess (SOTDMA). In order to make the most efficient use of the bandwidth available, vessels that are anchored or moving slowly transmit less frequently than those that are moving faster or are maneuvering.
The update rate ranges from 3 minutes for anchored or moored vessels, to 2 seconds for fast moving or maneuvering vessels.
Each AIS station determines its own transmission schedule (slot), based upon data link traffic history and an awareness of probable future actions by other stations.
A position report from one station fits into one of 2,250 time slots established every 60 seconds on each frequency. AIS stations continuously synchronize themselves to each other, to avoid overlap of slot transmissions.
Broadcast information
An AIS transceiver sends the following data every 2 to 10 seconds depending on a vessel’s speed while underway, and every 3 minutes while a vessel is at anchor:
Maritime Mobile Service Identity (MMSI) – a unique nine digit identification number.
Navigation status – “at anchor”, “under way using engine(s)”, “not under command”, etc.
Rate of turn – right or left, from 0 to 720 degrees per minute
Speed over ground – in knots
Positional accuracy:
Longitude – to 0.0001 minutes
Latitude – to 0.0001 minutes
Course over ground – relative to true north
True heading – 0 to 359 degrees
True bearing at own position. 0 to 359 degrees
UTC Seconds – The seconds field of the UTC time when these data were generated. A complete timestamp is not present.
In addition, the following data are broadcast every 6 minutes:
IMO ship identification number
Radio call sign
Name – 20 characters to represent the name of the vessel
Type of ship/cargo
Dimensions of ship – to nearest meter
Location of positioning system’s (e.g., GPS) antenna on board the vessel – in meters aft of bow and meters port or starboard
Type of positioning system – such as GPS, DGPS or LORAN-C.
Draught of ship – 0.1 meter to 25.5 meters
Destination – max. 20 characters
ETA at destination – UTC month/date hour :minute
Optional : high precision time request, a vessel can request other vessels provide a high precision UTC time and date stamp.
Advantages of AIS
Because VHF frequencies have a longer wavelength and better propagation, AIS signals have an ability to “see” behind islands or around bends in a river, where a radar cannot. This aspect of the AIS signal can add to safer navigation by detecting the where abouts of a ship, even when it is out of sight behind a headland or island.
Aids to navigation can be transmitted over AIS. These can be physical aids like buoys or “virtual” ones to mark a new or transient danger such as a wreck. AIS can also identify navigational aids that are not in their charted position.
Additionally, safety messages can be issued from either a ship or shore-based stations. A ship that is adrift may issue a broadcast warning “adrift with no engine”. Safety messages also may include meteorological broadcasts or search and rescue information.
AIS does not replace standing a proper watch, but it can add improved situational awareness for the watch-keeper and since the system constantly updates, real-time changes of another ship’s movements are immediately recognized.
Targets (ships) are easily identified because the name is broadcast to the receiving station. Making contact by actual ship name, instead of calling “ship off my port bow”, or “tanker at position latitude X, longitude Y” increases the likelihood of a positive response to the call. Using your vessel’s digital selective calling, you can punch in the MMSI number that AIS provides to ring the bridge of the ship directly. Hence use of VHF ch 16 is reduced.
The system also greatly increases safety at night and AIS signals are received in poor conditions such as heavy rain and squally conditions where a radar would show only noise.
Another benefit of AIS includes the ability to filter and prioritise targets. In a crowded harbour many vessels are moored in port or anchored awaiting to off-load their cargo. False alarms are greatly reduced by filtering out vessels or suppressing alarms for targets that are not moving, hence posing no collision risk, as one moves through the harbour.
It greatly reduces the RADAR errors of ‘lost target’ and ‘Target swapping’, Also the calculation time lost from ‘acquire target’ till ‘target data’ is available.
Errors due to Radar limitations, miscalculation, and display malfunctions can be greatly reduced.
The data obtained can be integrated with a ECDIS or a radar display, providing consolidated navigational information on a single display.
Can send / receive short Safety Text Message.
AIS contributes to safety of navigation and has, in many respects, made it easier to navigate safely.
There are, however, also some limitations to AIS that it is important to take account of. If you trust your AIS data blindly, it can be extremely risky.
Limitations
AIS uses VHF frequencies hence range is limited to LINE OF SIGHT (about 20-25 miles)
The use of VHF to discuss actions to take between approaching ships is fraught with danger and still discouraged. Identification of a target by AIS does not remove the danger.Not all ships will be fitted with AIS, particularly small craft and fishing boats. Other floating objects which may give a radar echo will not be detected by AIS.
AIS positions are derived from the target’s GNSS position. This may not coincide exactly with the target.
Faulty data input to AIS could lead to incorrect or misleading information being displayed on other vessels. Mariners should remember that information derived from radar plots relies solely upon data measured by the own-ship’s radar and provides an accurate measurement of the target’s relative course and speed, which is the most important factor in deciding upon action to avoid collision.
The ability to provide synthetic AIS targets and virtual navigation marks enable coastal authorities to provide an AIS symbol on the display in any position. Mariners should take particular care when an AIS target is not complemented by a radar target.
Collision avoidance must be carried out in strict compliance with the COLREGs. So far there is no provision in the COLREGs for use of AIS information therefore decisions should be taken based primarily on visual and / or radar information.
Long-Range Identification and Tracking (LRIT)
The Long-Range Identification and Tracking (LRIT) system provides for the global identification and tracking of ships.
The obligations of ships to transmit LRIT information and the rights and obligations of SOLAS Contracting Governments and of Search and rescue services to receive LRIT information are established in regulation V/19-1 of the 1974 SOLAS Convention.
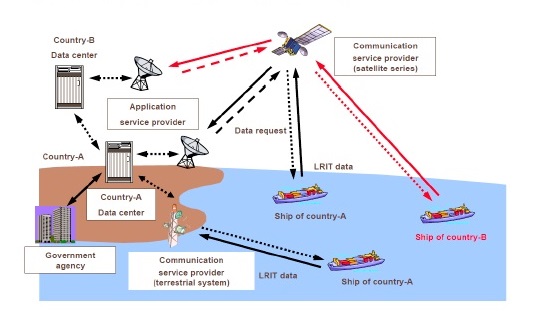
The LRIT system consists of the shipborne LRIT information transmitting equipment, the Communication Service Provider(s), the Application Service Provider(s), the LRIT Data Centre(s),including any related Vessel Monitoring System(s), the LRIT Data Distribution Plan and the International LRIT Data Exchange. Certain aspects of the performance of the LRIT system are reviewed or audited by the LRIT Coordinator acting on behalf of all SOLAS Contracting Governments.
LRIT information is provided to Contracting Governments to the 1974 SOLAS Convention and Search and rescue services entitled to receive the information, upon request, through a system of National, Regional and Cooperative LRIT Data Centres using the International LRIT Data Exchange.
Each Administration should provide to the LRIT Data Centre it has selected, a list of the ships entitled to fly its flag, which are required to transmit LRIT information, together with other salient details and should update, without undue delay, such lists as and when changes occur. Ships should only transmit the LRIT information to the LRIT Data Centre selected by their Administration.
Ships send automatic position reports every 6 hours, which are received by satellite, and securely transferred to data centres which manage LRIT information on behalf of flag States.
Each Flag state is obliged to establish National LRIT Data Centre or to join Regional or Cooperative Data Centre. The Flag also has to formally appoint an Application Service Provider (ASP). This ASP manages the communications between the ship, the Communication Centre provider (CSP) and the Data Centre (DC).
The DC collects all of the Flag’s LRIT information (such as the ships’ positional data and their identities) and is connected to the International LRIT system via the International Data Exchange (IDE) using a specific LRIT communications protocol. In addition, these centres shall be capable of communicating amongst themselves and exchanging position reports on request. A ship having notified a port of impending entry (NOA) can be tracked by that particular port thanks to this system.
Next to that, it will be possible for Contracting Governments to track any ship within a 1,000 nautical mile zone of its coastline, no matter what flag it is flying.
Ship LRIT equipment must be capable of being configured to transmit the following minimuminformation in an Automatically Generated Position Report (APR):
Ship identity
Ship position
Date and time of the position
Ship LRIT equipment must also be able to respond to requests from member states and LRIT data centres for immediate position reports and be able to change the time interval between reports to a maximum frequency of every 15 minutes
Global Positioning System (GPS)

A satellite navigation or sat nav system is a system of satellites that provide autonomous
geo-spatial positioning with global coverage. It allows small electronic receivers to determine their location (longitude, latitude, and altitude) to high precision (within a few metres) using time signals transmitted along a line of sight by radio from satellites. The signals also allow the electronic receivers to calculate the current local time to high precision, which allows time synchronization.
A satellite navigation system with global coverage may be termed a global navigation satellite system or GNSS.
Presently, only the United States NAVSTAR Global Positioning System (GPS) and the Russian GLONASS are global operational GNSSs. China is in the process of expanding its regional Beidou navigation system into the global Compass by 2020.
The European Union’s Galileo positioning system is a GNSS in initial deployment phase, scheduled to be fully operational by 2020 at the earliest. France, India and Japan are in the process of developing regional navigation systems.
Global coverage for each system is generally achieved by a satellite constellation of 20–30 medium Earth orbit (MEO) satellites spread between several orbital planes. The actual systems vary, but use orbital inclinations of >50° and orbital periods of roughly twelve hours (at an altitude of about 20,000 kilometres (12,000 mi)).
Working Principle Of GPS
The Global Positioning System consists of a network of 24 broadcasting satellites orbiting the earth at a height of 20,200km.
GPS also consists of receivers on the ground, which listen to and interpret the transmissions of the satellites. Stations on the earth carefully monitor the orbit of each satellite, maintaining a highly accurate record of the satellites instantaneous position. The knowledge of the precise position of the satellites allows them to be used as reference points, from which GPS receivers on earth can determine their position. This technique of determining the position of an object is called ranging.
The concept of ranging is best illustrated by example. Consider one satellite that is a distance of 25,000 kilometers from a person holding a GPS receiver. Then the person’s position is known to be somewhere on a sphere 25,000 km in radius, centered on the satellite. However, the exact location of the person on that sphere is yet unknown. If, at the same time, the distance from the person to a second satellite can be discovered to be 20,000 km, then a second sphere of radius 20,000 km on which the person is positioned can be determined. Thus the person must be on the circle formed by the intersection of the two spheres of position. A third satellite provides yet a third sphere, which narrows down the location of the person to exactly two points. One of these points is often an impossible solution, frequently several thousand kilometers off in space, thus three satellite ranges can determine the precise position of the person. Three satellites provide enough information to find the x, y, and z coordinates (measured from the center of mass of the earth). However, in practice, four satellites are required to pinpoint a position, for reasons that will soon become clear.
The distance from the receiver to one satellite is measured in the following way. The satellite and receiver are controlled by separate clocks. The satellites are set as accurately as possible with an atomic clock, and are assumed to be synchronized with one another. At some known time a satellite emits a signal in the form of microwaves. This signal reaches the receiver after a certain interval has passed.
Since microwaves travel at the speed of light, a known velocity and a known time allows the receiver to determine the distance to the satellite. Thus it is important that the time be measured precisely in order to accurately measure distance, as an error of the synchronization of the two clocks of one microsecond creates an error of 300 meters. This requires a fourth satellite, since a fourth variable, time, has been added to the unknowns who previously included only the x, y, and z distances.
GPS Function
The GPS uses three elements to accomplish transmission, maintenance, and user interface. These segments are referred to as space, control, and user.
Space Segment
Satellites
Currently there are thirty one GPS satellites orbiting the earth in a “constellation”. The constellation is divided into six “planes”. Each plane is tilted at a different angle relative to the equator and gives the satellites different paths over the earth’s surface. Each of these planes has at least four satellites spaced along its “ring”. This allows the GPS to have four satellites in view at anytime from anywhere on the earth. The satellites have a very precise clock on board and they transmit their clock signal continuously.
Control Segment
Control of satellites and ground assets is accomplished with a three part control system.
Master Control Station
A master control station and backup control station monitor the condition of the satellites in orbit and space weather in the vicinity of the satellites. The accuracy of a satellite’s orbit is monitored and adjusted from these stations and the on board clocks are synchronized within nanoseconds of the control clock.
Dedicated Ground Antennas
These assets are used to measure the accuracy of data transmitted from orbiting satellites. There are four dedicated antennas with fixed, known positions. They are used as references to calibrate instruments on board satellites.
Dedicated Monitoring Stations
There are six dedicated monitoring stations around the globe. These secondary stations are used to feed data about performance to the master control station and assure the health of each satellite. Many secondary stations are necessary because transmitted signals cannot penetrate the earth, so a single station is unable to monitor all satellites simultaneously.
User Segment
The user segment is what you encounter in you daily operations. A user segment consists of three components.
Antenna
A GPS antenna may be a single, low profile unit or may be an array of several antennas. Whether single or multiple the antenna does the same job of receiving signals from satellites in orbit and transferring those signals to the data processing unit they are connected to.
It is important to keep antennas free of obstruction or debris, most will still function but it is good practice to make sure all antennas have a good view of the sky.
Data Processing Unit
This device may be part of a display or it may be a separate device connected to a display. In commercial marine applications the GPS data unit is often located remotely from the display to avoid electrical interference, protect the unit from damage, or position the unit closer to antennas to avoid signal loss from long antenna cables.
The unit receives data from the antenna and combines the signals using a mathematical formula to determine the location of the receiver. This data is rendered into display format and sent to the display unit. The controls on the display unit may request additional information from the data processing unit.
Display
The information from the data unit is combined with other information like maps or charts and is displayed on a screen which may be a few inches across or very large and readable from several feet away. Location data might also be displayed simply in a latitude and longitude format in a separate small display.
Using GPS
Using GPS to navigate is very easy because most systems integrate the location data together with other data like electronic charts. The GPS places a vessel on the electronic chart for the viewer. Even a basic GPS provides latitude and longitude that can be recorded manually on a paper chart.
The amount of data needed to determine a GPS location is small and can be sent to parties who need to know a ship’s position. Shipping companies, traffic monitors, and law enforcement can be informed about the location and course of a vessel for efficiency or safety reasons.
Time Standardization
Because the GPS is based on time, every GPS unit has a very accurate synchronized clock as part of its construction. This clock adjusts for time zones automatically and allows all vessels and ports to operate on a time standard.
Latitude and longitude are usually provided in the geodetic datum on which GPS is based (WGS-84).
Receivers can often be set to convert to other user-required datum.
Position offsets of hundreds of meters can result from using the wrong datum.
GPS Errors
GPS errors are a combination of noise, bias, and blunders.
a) Noise Errors
Noise errors are the combined effect of PRN code noise (around 1 meter) and noise within the receiver noise (around 1 meter).
Noise and bias errors combine, resulting in typical ranging errors of around fifteen meters for each satellite used in the position solution.
b) Bias Errors
Bias errors result from Selective Availability and other factors.
Other Bias Error sources:
- SV clock errors uncorrected by Control Segment can result in one meter errors in position.
Tropospheric delays: 1 meter position error.
- The troposphere is the lower part (ground level to from 8 to 13 km) of the atmosphere that experiences the changes in temperature, pressure, and humidity associated with weather changes.
Unmodeled ionosphere delays: 10 meters of position error.
- The ionosphere is the layer of the atmosphere from 50 to 500 km that consists of ionized air.
Multipath: 0.5 meters of position error.
- Multipath is caused by reflected signals from surfaces near the receiver that can either interfere with or be mistaken for the signal that follows the straight line path from the satellite.
- Multipath is difficult to detect and sometimes hard to avoid. Care in antenna placement at fixed sites, special antenna configurations, and special tracking techniques can help sometimes.
c) Blunders
- Blunders can result in errors of hundreds of kilometers.
- Control segment mistakes due to computer or human error can cause errors from one meter to hundreds of kilometers.
- User mistakes, including incorrect geodetic datum selection, can cause errors from 1 to hundreds of meters.
- Receiver errors from software or hardware failures can cause blunder errors of any size.
d) Geometric Dilution of Precision (GDOP)
GPS ranging errors are magnified by the range vector differences between the receiver and the SVs.
GDOP is computed from the geometric relationships between the receiver position and the positions of the satellites the receiver is using for navigation.
GDOP Components:
- PDOP – Position Dilution of Precision (3-D)
- HDOP – Horizontal Dilution of Precision (Latitude, Longitude)
- VDOP – Vertical Dilution of Precision (Height)
- TDOP – Time Dilution of Precision (Time)
While each of these GDOP terms can be individually computed, they are formed from covariances and so are not independent of each other.
POSITIONS OBTAINED FROM GPS MUST BE CROSS CHECKED USING OTHER MEANS OF POSITION FIXING ESPECIALLY WHEN IN BUOYED CHANNEL AND DURING COASTAL NAVIGATION.
Voyage Data Recorder (VDR)

Voyage data recorder, or VDR, is a data recording system designed for all vessels required to comply with the IMO’s International Convention SOLAS Requirements
(IMO Res.A.861(20)) in order to collect data from various sensors on board the vessel. It then digitizes, compresses and stores this information in an externally mounted protective storage unit. The protective storage unit is a tamper-proof unit designed to withstand the extreme shock, impact, pressure and heat, which could be associated with a marine incident (fire, explosion, collision, sinking, etc.).
The protective storage unit may be in a retrievable fixed unit or free float unit (or combinedwith EPIRB) when the ship sinks in a marine accident The last 24 hours of stored data in the protected unit can be recovered and replayed by the authorities or ship owners for incident investigation. Beside the protective storage unit, the VDR system may consist of recording control unit and data acquisition unit, which connected to various equipment and sensors on board a ship.
Although the primary purpose of the VDR is for accident investigation after the fact, there can be other uses of recorded data for preventive maintenance, performance efficiency monitoring, heavy weather damage analysis, accident avoidance and training purposes to improve safety and reduce running costs.
Simplified voyage data recorder (S-VDR), as defined by the requirements of IMO Performance Standard MSC.163(78), is a lower cost simplified version VDR for small ships with only basic ship’s data recorded.
The information recorded in the unit(s), sometimes also called Black box for ship, may include the following information:-
Position, date, time using GPS.
Speed log – Speed through water or speed over ground.
Gyro compass – Heading.
Radar* – As displayed or AIS data if no off-the-shelf converter available for the Radar video.
Audio from the bridge, including bridge wings.
VHF radio communications.
Echo sounder* – Depth under keel.
Main alarms* – All IMO mandatory alarms.
Hull openings* – Status of hull doors as indicated on the bridge.
Watertight & fire doors* status as indicated on the bridge.
Hull stress* – Accelerations and hull stresses.
Rudder* – Order and feedback response.
Engine/Propeller* – Order and feedback response.
Thrusters* – Status, direction, amount of thrust % or RPM.
Anemometer and weather vane* – Wind speed and direction
Data marked with * may not be recorded in S-VDR, except Radar and Echo Sounder if data & standard interfaces available.