
Crash Stop
No type of main engine can be reversed immediately from full rpm ahead to full rpm astern because no engine can drive the propeller at full revolutions astern while the ship herself is moving ahead at considerable speed.
The application of full astern power to an engine of any type when the ship is moving at full speed ahead would place high and perhaps crippling stresses on the engine. This is well known to the engineer, who is unlikely to attempt it except in the gravest of emergency situations.
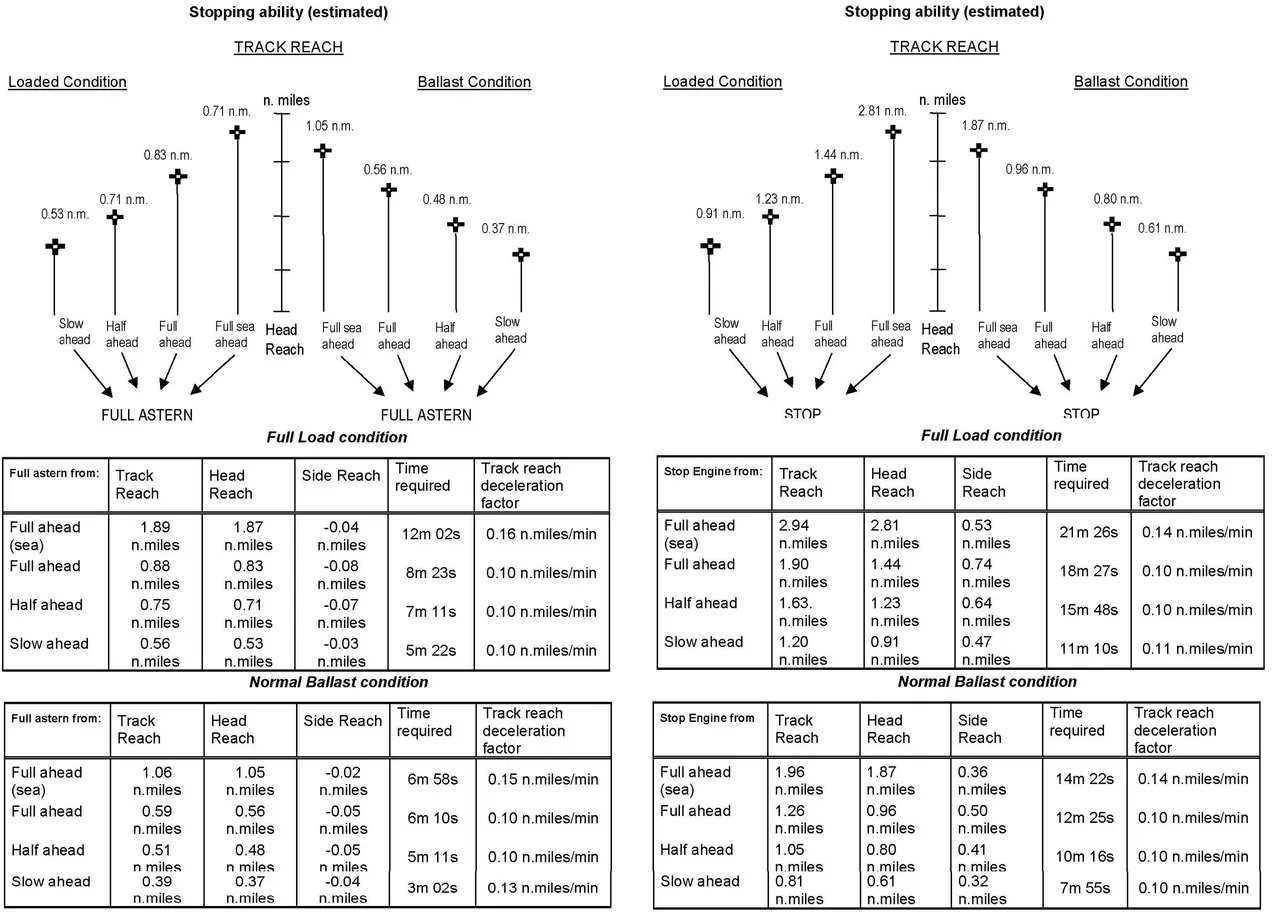
A fully loaded motor ship of about 14,000 tonnes displacement manoeuvring from “sea speed” to standstill from a speed of about 14 knots, will still be moving ahead at 2 to 3 knots so fifteen minutes after the ‘Stop’ order was given. The engine rpm will fall from 110 to 40 in about 7 to 8 minutes and gradually come to rest after about 12 minutes.
If a crash stop is demanded, the engine can readily be reversed after about 3 minutes, while still running ahead at about 30 rpm and can be running at 60% power in about 5 minutes. A slower vessel, or one in ballast, would take less time to accomplish this.
A single-screw ship will cant her bow briskly to starboard under astern power and will bring her stern into the wind once sternway is built up.
Under collision risk, the stopping TIME matters much less than the stopping DISTANCE and this is shortest (in larger, faster vessels) when
- the ahead power is instantly shut off and
- after an interval of about 2 to 3 minutes the engine is put slow, half and then full astern in succession.
The immediate application of full astern power will result in cavitation at the propellor and actually increase the stopping distance. In smaller and slower ships, the application of full astern power as soon as practicable may still be more effective.
Most vessels will travel approximately 5 to 12 times their own length before coming to rest from full ahead depending on displacement, trim, speed, type of machinery, etc., and will take from 4 to 10 minutes to do so.
This is why it is so important to reduce speed in low visibility.
The application of full rudder to both sides alternately will help in reducing headway during the first few minutes after stopping engines.
Crash astern steps
When the engine is operating in ahead direction and a crash astern movement is given, the following will be the sequence of events:
a. Bridge orders crash astern. The communication to engine room:
i. When in Engine room control mode – Conventionally bringing the bridge telegraph from head to full astern then again to full ahead and again to full astern was the standard way to communicate crash astern to engine room. Engine room implements the astern command given by bridge on telegraph.
ii. When in Bridge control mode – In modern ships with automation and controls, the bridge telegraph is directly connected with the engine controls and it doesn’t require involvement of engine room personnel. Such type of telegraph is called remote controlled telegraph device.
A provision is given to link both the telegraph so that manual operations can also be carried out in case of automation failure.
In bridge control mode, to give crash astern, Bridge officer should directly put the telegraph to Emergency Full Astern or full astern, as available. Engine will automatically comply with the order.
b. Main Engine fuel supply is immediately put to zero
c. Engine may continue to turn in ahead direction due to the momentum of the vessel even if the fuel supply is cut off, hence the tachometer on the bridge may still show ahead rpm.
d. Engine (Engineer will do this it is in Engine control mode) is now waiting for the ahead rpm of the engine to come down to the reversing level as prescribed by the engine manufacturer (which is around 25% to 30 % of MCR rpm)
e. As the engine rpm reaches the reversing level, admit starting air (in the astern direction) this is also known as braking air. Attempting to admit the braking air at higher rpm is termed as “braking air”, which can cause very high level of Stresses and break the crank shaft.
f. Repeated kicks of braking air are then given to bring down the engine rpm to zero.
g. Once engine rpm is at zero, starting air in astern direction is admitted
h. As the engine rpm reaches the start level in astern direction, fuel is injected.
i. Engine starts turning on fuel in astern direction
j. Vibration may be set up due to heavy wake disturbance; hence the astern rpm will have to be gradually increased. Similar sequence will automatically take place on a ‘bridge controlled vessel’.
Crash astern will not immediately stop the vessel which was moving in ahead direction with full speed, it will take some time. The Bridge team should be familiar with the following data on their vessel:
- How much time will it take for the vessel to stop after the crash astern order is given?
- How much distance will the vessel travel before it stops?
High Frequency Cycling
Gives a stopping distance of approximately 10 times the ships length.
Uses the “drag” of the rudder to reduce headway
Put the rudder hard over and stop the engines. As the vessel starts to swing, put helm hard over the other way.
Continue to do this cycling until vessel is stopped.
You may need a short burst of ahead power and corrective helm to bring the vessel back on course.
This results in minimal deviation of heading and the effectiveness of the manoeuvre is not reduced by shallow water.
This manoeuvre is not really suitable for use on vessels of full hull form which are deeply laden.
Most effective on fine form vessels in lightship condition.
Low Frequency Cycling
Gives a stopping distance of approximately 6 times the vessel length.
Uses the “drag” of the hull as the vessel turns. Put rudder hard over to port until vessel is 40 degrees off course, then hard to starboard with full astern. This will stop the vessel with small deviation to the port side of her course and close to her original heading. Shallow water will reduce the effectiveness of this manoeuvre.
It must be remembered that vessels on reciprocal courses will close at their combined speeds and that a ‘safe’ speed to conform with IRPCS should therefore be one at which the vessel can be brought to a standstill in half the range of her visibility.
You ought to take part in a contest for one of the
most useful blogs on the net. I most certainly will highly recommend this blog!