POSITION FIXING
Good navigational practice demands that the officer of the watch:
● Uses visual navigation aids and Radar to support electronic position-fixing methods, i.e. landmarks in coastal areas and celestial navigation in Ocean passage / Deep waters.
● Does not become over reliant on automated navigational equipment, including electronic chart systems, thereby failing to make proper navigational use of visual information.
● Ensure whilst changing charts that the last plotted position is repeated on both the charts to ensure continuity of vessel’s track.
POSITION FIXING INTERVAL
The frequency of position fixing should be such that the vessel must not run into danger during the interval between fixes. The vessel’s speed and proximity of navigational hazards should be taken into consideration when determining the position fixing intervals.
During Pilotage, the minimum position fixing interval should be basis the type of waters (ambience), vessel is navigating in.
While conducting STS operations when underway, Master should determine the interval depending upon weather, proximity to hazard, manoeuvrability, and the current parameters of the mother / daughter
vessels.
Notwithstanding the above, the Master must review the position fixing / cross-checking requirements and may reduce the intervals as required.
Position Cross- Checking in ECDIS:
When using paper charts,the term “position fixing interval” meant how often position will be plotted manually on the paper chart by OOW.
While using ECDIS, position is being fixed and being recorded continuously using GPS feed. Hence, with ECDIS, we require to carry out position cross checking rather than fixing.
Frequent checks should be made of the ECDIS position fixing system (normally GPS) by the use of other means, including but not limited to:
a) Parallel indexing and use of clearing bearings;
b) Use of radar to check the accuracy of the charted position by comparing the location of the radar target against the charted symbol;
c) Visual cross bearings;
d) Comparison of the signal to noise ratio of the GPS system in use.
e) Cross checking between 2 GPS units and / or by ascertaining quality of the fix of each unit.
f) Occasionally by Astronomical sights.
A screenshot of the position being monitored should suffice above requirement. Evidence of cross checking position e.g. saved screenshots in ECDIS should be kept for inspection / audit.
Celestial Observations
During deep sea voyages, GPS, if fitted, is the most favored means of obtaining the vessel’s position.
When in Ocean passage / Deep waters there must be evidence that at least two independent methods are used for fixing the ship`s position.
Where the vessel carries only one electronic position fixing aid suitable for deep sea navigation then positions derived should be verified by alternate methods such as Celestial Observation.
GPS derived positions should be verified whenever possible by alternative methods such as Celestial Observations, visual and radar position fixing and monitoring techniques.
Important: Many areas of the world have not been surveyed to modern standards hence the positional accuracy of the charted detail on the paper chart, Raster chart or ENC may not be as accurate as the GPS receiver derived position. If it is not possible to verify a GPS position by alternative methods, a sensible safety margin shall be allowed to account for any such discrepancies.
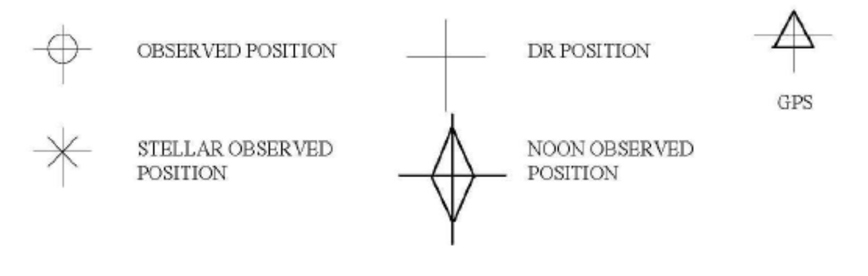
The standard symbols for Position fixing must be displayed in a convenient location in the vessel’s chart room.
STANDARD SYMBOLS USED IN POSITION PLOTTING ON PAPER CHARTS
METHODS OF POSITION-FIXING
Vessel’s position can be obtained using any or combination of the following means:
● Visual compass bearings
● Line of soundings using the echo sounder
● Radar bearings
● Radar ranges
● Electronic aids to navigation such as GPS.
● GPS Navigator
● Transit bearings