Explain the basic properties of a free gyroscope
- A free gyroscope has two unique properties which are the very basis of its behaviour. These are
- Gyroscopic inertia
- Precession.
Gyroscopic Inertia:
- A freely spinning gyroscope will maintain its axis of spin in the same direction in space regardless of how its supporting base is turned.
- It resists any force attempting to turn its axis of spin in a new direction.
- This property is termed as ‘the rigidity in space’
- Every particle in the spinning wheel is acted upon by centripetal force towards its centre and by equal centrifugal force directed outwards.
- Thus, there is a sufficient cohesion between particles and the wheel continue to maintain its rigidity in space, pointing at an imaginary star, sometimes called a gyro-star.
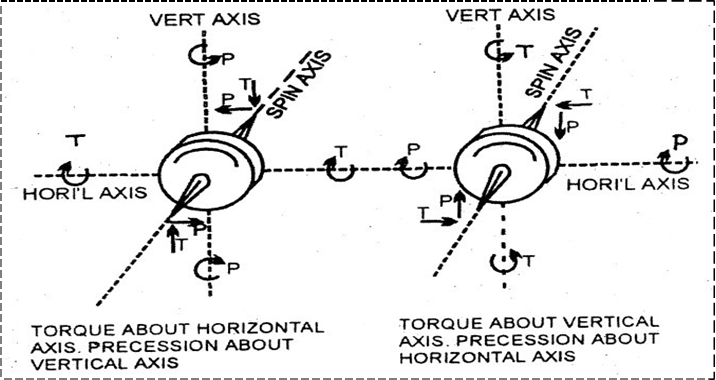
Precession:
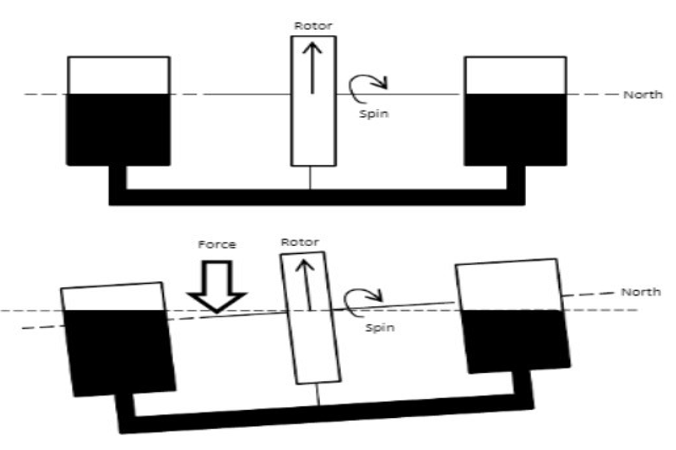
- It is the movement of the spin axis when a force is applied to the gyroscope.
- When a couple is applied about its horizontal axis the spin axis will turn at right angles to the applied force in the direction of the spin of the wheel.
- Similarly, a couple applied about the vertical axis will make the spin axle turn about the horizontal axis in the direction of the spin of the wheel.
- This property is called precession.
With reference to marine gyro compass, briefly explain the following:
Drifting
Tilting Drifting & Tilting:
- If we place an imaginary star, called gyro star on the celestial sphere in the direction in which the axis of the gyro is pointing then this imaginary star will rise, culminate and set as the earth rotates.
- Hence with respect to surface of the earth, axis of the gyroscope is not pointing in a fix direction but towards a gyro star and thereby changing in altitude and azimuth.
- The angle of elevation or depression of the spin axis above or below the horizontal is referred to as tilt.
- The movement of the spin axis in the direction of azimuth is called as drift.
- Tilting = 15 Cos Latitude x Sine Azimuth per minute of time Drifting = 15 Sine Latitude per minute of time
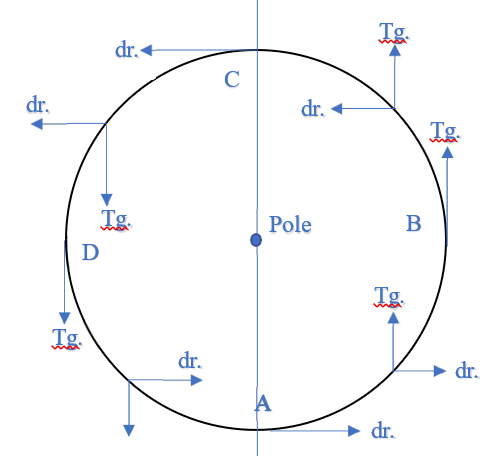
- Consider the gyroscope at point A pointing eastwards. As the earth rotates, relatively the gyroscope axis will increase in tilt and drift and follow the curve A, B, C and D.
- At B the drift will be zero and gyro will now only tilt. As the earth continues to rate, the drift will now be in opposite direction till point C when tilt is maximum.
- From here onwards the tilt is reducing and at point D, the drift again becomes eastwards to complete the circle back at A.
How a free gyroscope is converted into a north seeking device
- Free gyroscope is not much of a use as a compass as it continuously changes its azimuth and tilt due to the rotation of the earth.
- Thus, the property ‘gyroscopic precession’ is used to control the gyro so that it moves around the meridian.
- This controlled gyro is therefore said to be north seeking.
- Earth’s gravity is used to achieve the precession required to make the gyro north seeking.
- Two methods of making the gyro north seeking.
- Top heavy control force
- Bottom heavy control force
Top Heavy Control Force
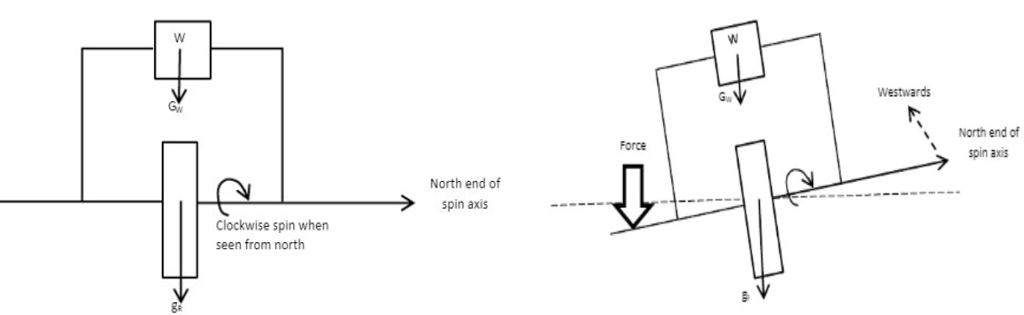
- W is the weight and Gw is the centre of gravity of the weight and gR is the centre of gravity of the gyroscope.
- When spin axis is parallel to the earth’s surface then Gw and gR are in one direction and no force is applied to rotor.
- If the gyro spin axis tilts up, when the earth rotates, the Gw and gR are no more in line and a force is applied to the south end of axis.
- This force applied to the south end will cause the north end to precess westwards, (i.e. the arrow will move towards its left)
- Liquid ballistic is used to give a form of gravity is used in Sperry make of gyro.
- North seeking gyro must be adjusted to north settling in order to use it as compass.
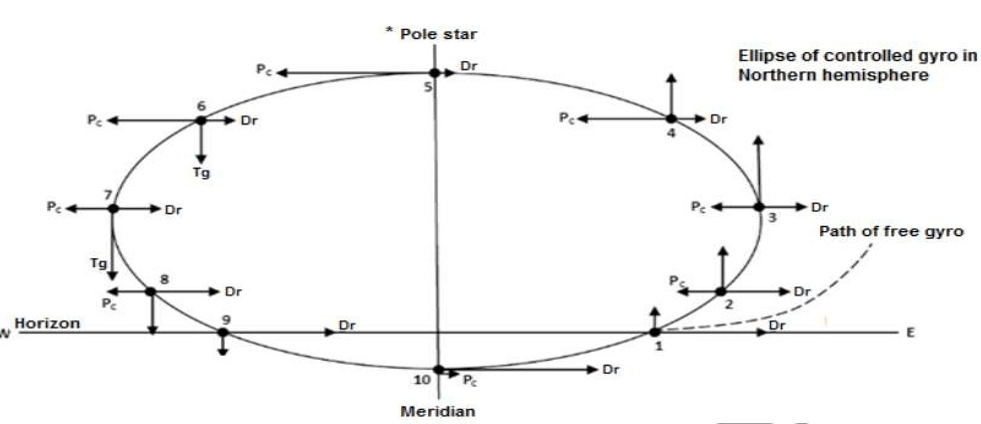
Path traced by a North seeking gyro:
- The path of the north seeking gyro is shown below.
- Dr – rate of drift
- Tg – rate of change and direction of tilt
- Pc – Precession due to controlled forces
Operating principle and care of gyro compass
Operating Principle:
- Free gyroscope is not much of a use as a compass as it continuously changes its azimuth and tilt due to the rotation of the earth.
- Thus, the gyro must be made north seeking and then to north settling so that the axle continuously points on the meridian and horizontal.
- In the Sperry make gyro, the gyro is made to north seeking by top heavy method and made to north settling by damping the tilt.
North Seeking
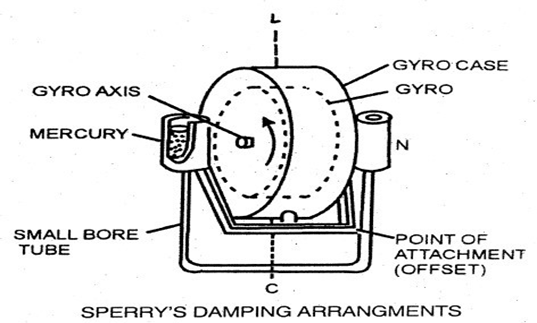
- Sperry gyro uses liquid ballistic to give a form of a gravity to make the gyro north seeking.
- When the gyro tilts, liquid flows between the north and south ends of the rotor under the influence of gravity.
- The rotor spin direction is clockwise seen from north end and hence when the gyro tilts up, liquid flows creating torque and it will produce a precession which moves the north end of spin axis to the west.
- The advantage is that the liquid (mercury) is chosen such that it is slow to respond to sudden changes caused by ship’s movement but still responds to gradual changes produced by the earth’s movement.
North Seeking:
- The controlled gyro will not settle in a fixed direction in any meridian but will oscillate about the meridian.
- To damp the unwanted oscillation another torque perpendicular to the first one has to be introduced which will cause precession in the direction perpendicular to the original precession.
- In the Sperry compass a torque about vertical is produced in such a manner as to create a downward precession of the north end if it tilts up and to cause upward precession it tilts down.
- This is achieved by attaching the mercury ballistic frame slightly (by 3.762mm) to the east of the true vertical through the rotor case.
- Since the direction of rotation of the wheel is anti-clockwise seen from south end, the attachment to the eastern side is the correct side so as to make the south end precess up, eventually north end precess down achieving damping the tilt.
- The outer member called the phantom element of the gyro compass supports the ballistic control and follows every movement of the gyro.

Steaming error. Why is it caused and how it affects the settling position of a gyro compass?
- When the ship is moving, the course and speed of the ship affects the gyro compass.
- The error introduced is maximum on the north – south course and reduces to zero on east – west courses.
- This is because the earth rotates from west to east and the movement of the ship is east – west direction only adds or subtract from earth’s rotational speed.
- The gyro axle will come to rest at right angles to the relative direction it is being carried.

- N is the N-S line true meridian; OX represents the rate of eastward movement due to earth rotation.
- When the vessel is stopped, the earth rotates along OX, and gyro axle will settle at right angles to relative direction OX, i.e. gyro will settle in N-S line.
- When the vessel is moving along OP, the earth rotates along OX, the resultant of these vectors is OR.
- Now the gyro axle will settle at right angles from OR i.e. gyro will settle in ON’ virtual meridian.
- Angle between ON’ and ON is the steaming error or course speed error.
- Thus, on northerly course the gyro axle will apparently tilt north end up and causes the gyro to precess towards west and settles west of the meridian. Similarly, on southerly course the gyro will settle east.
- It is the north-south component of the speed that matters, which is dependent on the course and speed of the ship and hence it is called the course and speed error.
Formula for steaming error if the vessel is steering north easterly course

V sin α = Easterly component of ship’s speed α = Ship’s course
V cos α = Northerly component of ship’s speed
Angle acb = dcb
Angle abc = angle bdc = 90°
Angle bac = angle cbd = θ = ERROR

Damping error in a gyro compass /settling error of a Gyro compass damped in Tilt /latitude error.

Effect of damping in tilt:
- As the controlled gyro precession tries to follow the ellipse due to tilt, the damping precession will oppose the tilting.
- Thus, gyro’s angle of tilt when reaching the meridian, is not as great as for the undamped gyro. So, the control precession is less and eastward drift is greater, therefore they gyro spin axis will not travel as far west.
- As the gyro spin axis returns to the horizon, the damping precession will assist its return.
- As the axis returns to the horizon the damping precession will oppose it reducing the angle of tilt downward and this reduces the eastward drift and control precession.
- The gyro therefore does not travel as far east.
- Next time around the ellipse the damping precession will again oppose movement away from the horizon, so again the maximum angle of tilt will be reduced making the ellipse smaller.
- Eventually the gyro will settle where control precession cancels drift and the damping precession cancels the movements of tilt.
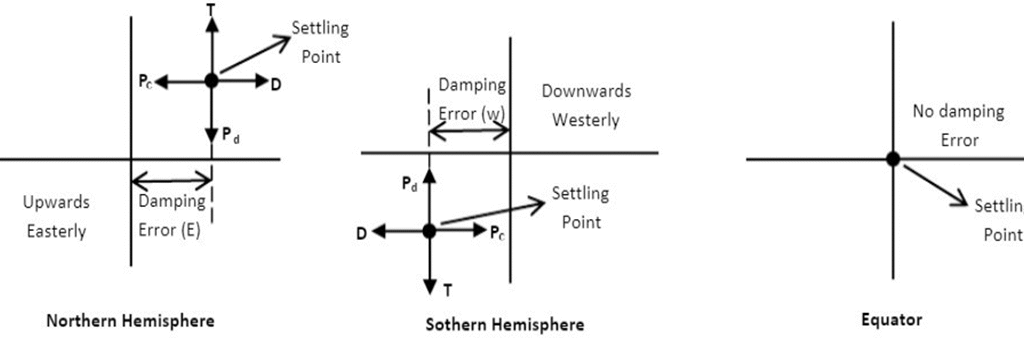
- Therefore, in northern hemisphere, an angle of tilt must exist to provide the control precession to cancel the drift.
- This angle of tilt produces a damping precession which must be controlled by the movement of the tilt.
- For this movement of tilt to exist, the gyro spin axis must be pointing east of the meridian.
- Thus, spin axis settles with an angle of tilt upwards and pointing slightly to the east of the meridian.
- This small amount of the gyro axis settling out of the meridian is known as the Damping error or latitude error.
- In southern hemisphere the gyro will settle with an angle of tilt downwards and pointing west of the meridian.
Damping Factor / Percentage damping / Period of compass / Settling position of compass
Damping Factor:
- In gyro compass, the damping factor refers to a parameter that determines the rate at which the compass card settles and stabilizes.
- It represents the degree of damping or resistance to oscillation in the compass system.
- By controlling the damping factor, the gyro compass can be optimized to have a balance between stability and responsiveness.
- A higher damping factor results in quicker settling but may sacrifice some sensitivity.
- Lower damping factor allows for more responsiveness but may result in longer settling times.
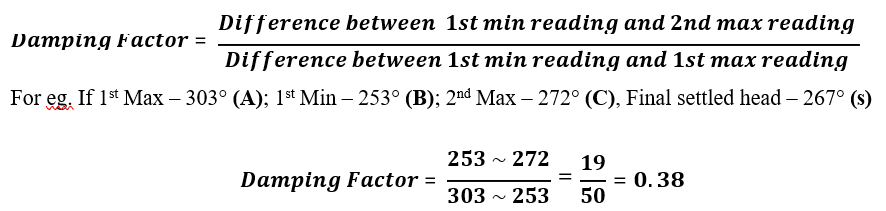
- After starting the gyro, its first maximum reading, first minimum reading, second maximum reading and final settled ship’s head are noted.
Percentage Damping:
- In gyro compass, the percentage damping is one of the parameters to determines the rate at which the compass card settles to the true north.
- It is the ability to dampen or minimize the oscillations of the compass card.
- Usually expressed as a percentage and represents the amount of damping applied to the compass card’s movement.
- Higher damping percentage means stronger damping forces are applied, resulting in quicker settling of the compass card.
- Damping percentage = (1- f) x 100, from the above example, (1 – 0.38) x 100 = 62%
Period of Compass:
- It is another parameter used to check the performance of the gyro compass.
- It is the period from initial time at maximum swing to the settling time.
- As per IMO performance standards, when switched on in accordance with manufacturers instruction, the compass should settle within 6 hours in latitude up to 60°.
Settling Position:
- Settling position is the heading gyro compass settles into after it has been installed and started.
- As the gyro compass settles it gradually aligns itself with the earth’s rotation axis and the true north.
- Once it reaches its settling position, it maintains stable and accurate indication of the true north direction.
- As per IMO performance standards, the settling point heading is the mean value of 10 readings taken at 20 min intervals after compass is settled.
- The settling point error is the different between the observed value and settling point heading.
- The settling point error at any heading and at any latitude up to 60° should not exceed + 0.75° x sec lat.
- From the ongoing example values,

